THE FLIGHT MODEL TAB

The Flight Model section of the Aircraft Editor is for defining the different aspects of the simulation flight model for the aircraft. Below you can find information on the different sections used by the flight model file as well as what parameters and values are expected within them. You can also find an in-depth explanation of the physics behind the flight model from the following page:
NOTE: To help with the configuration of the Flight Model (and The Engines) we have included an *.xlsx file with the documentation that can be used to generate the required values for many of the parameters based on a small number of inputs (these inputs are marked in blue in the file): PlanePerformance.xlsx
Weight And Balance

This section is used to define the weight and balance of the aircraft. Most position parameters in this section are given relative to the Datum Reference Point for the aircraft, which is itself specified in this section. The convention for positions is that a positive value equals forward, to the right, or vertically upward, and note that all units are in ft, unless mentioned otherwise.
The available parameters for this section are:
- Max Gross Weight: The maximum total weight of the aircraft when fully loaded, in lbs.
- Empty Weight: The empty weight of the aircraft, in lbs.
- Reference Datum Position: Many positions of components on an aircraft are given relative to the datum reference point for the aircraft which is defined in this section using the following parameters:
- Longitude (Z): where positioning to the front requires positive values and to the back negative values.
- Latitude (X): where positioning to the right requires positive values and to the left negative values.
- Vertical (Y): where positioning vertically up requires positive values and down negative values.
The image below illustrates this:
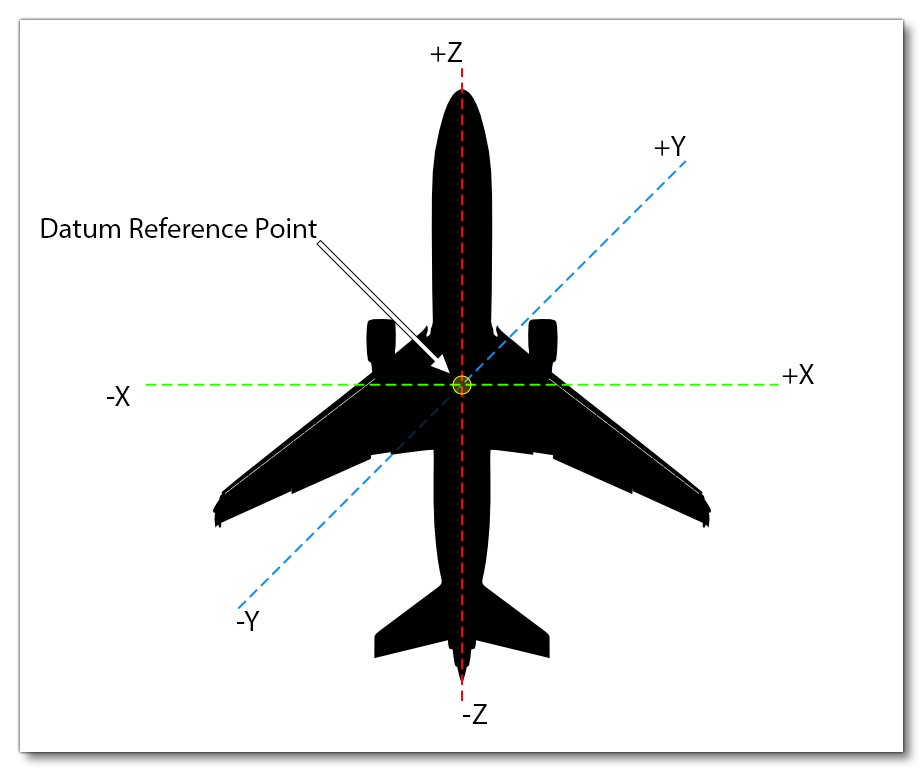
The actual physical details of how we calculate this point is given in the Reference Datum Frame section of the page on Flight Model Physics. Note that you can enable the Show Gizmo option to show the position gizmo in the simulation then click and drag that around to position the reference datum point visually.
- Empty Weight CG Position: The position of airplane empty weight CG relative to the Reference Datum Position. This paramater requires you to set the Longitude (Z), Latitude (X) and Vertical (Y) position of the aircraft CG, and you can enable the Show Gizmo option to place this position visually in the simulation.
- CG Forward Limit: Forward limit of the CG as a Percent Over 100. For example, 0.11 is equal to 11% MAC.
NOTE: This parameter is only valid for airplanes.
- CG Aft Limit: Aft limit of the CG as a Percent Over 100. For example, 0.4 is equal to 40% MAC.
NOTE: This parameter is only valid for airplanes.
- CG Feet Forward Limit: The forward limit of the CG expressed in ft from the Datum Reference Point.
NOTE: This parameter is only valid for helicopters.
- CG Feet Aft Limit: The aft limit of the CG expressed in ft from the Datum Reference Point.
NOTE: This parameter is only valid for helicopters.
- CG Feet Lateral Left Limit: The right-side lateral limit of the CG expressed in ft from the Datum Reference Point.
NOTE: This parameter is only valid for helicopters.
- CG Feet Lateral Right Limit: The left-side limit of the CG expressed in ft from the Datum Reference Point.
NOTE: This parameter is only valid for helicopters.
- Activate Mach Limit from CG: When this option is checked it activates Mach limitation depending on the CG position for the aircraft. The default here most aircraft is to have this unchecked.
- Activate CG Limit From Mach: When this option is checked it activates CG position limitation depending on the Mach for the aircraft. The default here most aircraft is to have this unchecked.
- Max Number Of Stations: The maximum number of payload stations. If this is greater than 0, then each station should be defined in the Station Load Factory Mass section, below. Normally you would have at least one station for the pilot of the aircraft.
- Station Load Factory Mass: This section can be used to define each of the available payload stations, up to the maximum defined by the Max Number Of Stations value. Clicking the
+button will add a new payload station index to the aircraft, and clicking thexbutton will remove the currently selected payload station index, refactoring the payload station definitions so that they are still indexed in ascending order to fill in the "blank" index left by the deletion. Additionally the editor has a button to duplicate🗐the currently selected payload station, as well as re-order them using the↑button or↓buttons. Once a station load has been added you need to fill in the following additional parameters:- Weight: The approximate weight, in lbs, for the station.
- Position (long, lat, vert): The position of the station relative to the Reference Datum Position. This parameter requires you to set the Longitude (Z), Latitude (X) and Vertical (Y) position - in ft - and you can enable the Show Gizmo option to visually position it.
- Name: This is a localisable string that can be used as the name of the station.
- Type: The type of station being defined. Can be any of the following options (note that station 0 is usually assigned to the pilot, and station 1 is usually assigned to the co-pilot):
- Unknown
- Pilot
- Copilot
- Passenger
- Front Pax
- Rear Pax
- Baggage
xbutton at the bottom.
- Station Name: Here you can apply a common name to the different payload stations. Clicking the
+button will add a new station name index to the aircraft, and clicking thexbutton will remove the currently selected station name index, refactoring the station name definitions so that they are still indexed in ascending order to fill in the "blank" index left by the deletion. Additionally the editor has a button to duplicate🗐the currently selected station name, as well as re-order them using the↑button or↓buttons. Note that the index of each station name should match the corresponding Station Load index.
Contact Points

This section is for defining the points on the aircraft body referential frame which are likely to come in contact with the ground. These parameters are used for correctly positioning the aircraft on the ground and also for crash simulations. This section has the following parameters:
- Static Pitch: The pitch of the aircraft when at rest on the ground, in degrees, where a positive value is "up" and a negative value is "down".
NOTE: Static pitch is only used when the physics simulation for the aircraft is not active: for example in the Hangar or in ready-to-take-off RTCs.
- Static CG Height: The altitude of the CG when at rest on the ground, in ft.
NOTE: Static CG height is only used when the physics simulation for the aircraft is not active: for example in the Hangar or in ready-to-take-off RTCs.
- Tailwheel Lock Available: When checked, the tailwheel locking mechanism is available.
- Gear System: Sets the type of gear system for the aircraft, which can be any one of the following -
- Electrical
- Hydraulic
- Pneumatic
- Manual
- None
- Undefined
Note that when using Hydraulic gears, an additional parameter will be visible in the window: Gear System Needs Power
- Emergency Extension Type: Sets the type of emergency gear extension system is used by the aircraft. This can be any one of the following -
- None
- Pump
- Gravity
- Hydraulic (this requires that a Hydraulic System is set up)
- Gear System Needs Power (Optional): This parameter is only available when the Gear System is set to Hydraulic and - when checked - sets the hydraulic systems for the landing gear to require power to function.
- Gear Locked On Ground: When checked, this option locks the landing gear handle to down when the plane is on the ground.
- Gear Locked Above Speed: This parameter defines the speed at which the landing gear handle becomes locked in the up position, in ft per second. Note that a value of -1 can be used to disable this option.
- Locked Tailwheel Max Range: This parameter defines the maximum angle of rotation for the tailwheel when locked, in radians.
- Allow Stopped Steering: When this option is checked, the steering for the aircraft will still be available when stopped.
- Max Speed Full Steering: This parameter defines the speed under which the full angle of steering is available, in ft per second.
- Max Speed Decreasing Steering: This parameter defines the speed above which the angle of steering stops decreasing, in ft per second.
- Min Available Steering Angle Pct: This parameter defines the percentage of steering which will always be available even above Max Speed Decreasing Steering, as a Percent Over 100.
- Max Speed Full Steering Castering: This parameter defines the speed under which the full angle of steering is available for free castering wheels, in ft per second.
- Max Speed Decreasing Steering Castering: This parameter defines the speed above which the angle of steering stops decreasing for free castering wheels, in ft per second.
- Min Castering Angle: Defines the minimum angle a free castering wheel can take (in radians).
- Max Castering Angle: Defines the maximum angle a free castering wheel can take (in radians).
- Max Number Of Points: The number of contact points for the aircraft. Note that if this parameter is omitted, then the maximum will be set to 25 and any defined points above this value will be ignored. It should also be noted that the simulation will expect the exact number of Contact Points defined to be the same as the maximum given here. So, if you have this set to 10, you will need to have defined 10 points (0 - 9).
- Set Max Compression: This can be used to change the way how the Max To Static Compression parameter in the Point list will be used. If checked then the parameter specifies the maximum compression of the contact point (in feet) instead of their maximum-to-static compression ratio (which is unitless).
- Spring Exponential Fix: This parameter is only required to fix a potential issue related to the Exponential Constant parameter in the point definition. When this exponential constant is greater than 1, or very close to 1, the default algorithm lowers the spring force if compression is low. When this parameter enabled, if the exponential constant is greater than 1 then it becomes the denominator for the linear spring force curve in the low compression range, and the power of this curve in the high compression range. See Notes On The Exponential Constant for more information.
- Contact Points: This is a list of contact point definitions, the number of which must match the Max Number Of Points value. Clicking the
+button will add a new contact point to the aircraft, and clicking thexbutton will remove the currently selected contact point, refactoring the contact point definitions so that they are still indexed in ascending order to fill in the "blank" index left by the deletion. Additionally the editor has a button to duplicate🗐the currently selected contact point, as well as re-order them using the↑button or↓button. Each contact point requires the following inputs to define it (note that for contact points other than landing gear, only the Type and Position need to be set and all other values can be left at 0/default):- Type: Sets the type of contact point being defined for the aircraft. This can be any one of the following -
- wheel
- scrape point
- skid
- float
- water rudder
- ski
- propeller
- Position (Long, Lat, Vert): The position of the contact point relative to the Reference Datum Position. This parameter requires you to set the Longitude (Z), Latitude (X) and Vertical (Y) position - in ft - and you can enable the Show Gizmo option to visually position it.
- Crash Velocity: This sets the impact damage threshold crash velocity, in ft per minute.
- Brake: Sets the type brake system that a wheel point uses. This can be any one of the following -
- ignore
- left
- right
- both
- Wheel Radius: The wheel radius, in ft.
- Wheel Steering Angle: Wheel max steering angle, in degrees, between -90 and 90.
- Static Compression: The static compression coefficient constant (which is used to compute spring reaction when on the ground), in ft. If the contact point is rigid, then set this to 0. Please see Notes On Spring/Damping Factors for more information.
- Max To Static Compression: If the Set Max Compression parameter is checked then this specifies the maximum compression of the contact point, in feet. If the parameter is not checked, then this sets the maximum-to-static compression ratio for the contact point (a unitless value). Please see Notes On Spring/Damping Factors for more information.
- Damping Ratio: The damping ratio constant used to compute ground reaction damping. A value between 0.0 (un-damped) and 1.0 (critically damped) is expected here. Please see Notes On Spring/Damping Factors for more information.
- Extend Time: Extension time, in seconds. This is the time required to fully extend wheels/water rudder/skis/floats.
- Retract Time: Retraction time, in seconds. This is the time required to fully retract wheels/water rudder/skis/floats.
- Sound ID: Identifies the type of sound that is going to be played for the contact point. Must be one of the following -
- Center Gear
- Auxiliary Gear
- Left Gear
- Right Gear
- Fuselage Scrape
- Left Wing Scrape
- Right Wing Scrape
- Aux1 Scrape
- Aux2 Scrape
- Tail Scrape
- Airspeed Retraction Limit: The airspeed limit below which you can retract the gears, in kias.
- Airspeed Damaged: Airspeed limit above which gear is damaged, in kias. For more information see here: Landing Gear Damage.
- Exponential Constant: The exponential constant for springs (if in doubt, set to 1). For more information, see the Notes On The Exponential Constant and Notes On Spring/Damping Factors.
- Type: Sets the type of contact point being defined for the aircraft. This can be any one of the following -
Fuel

This section is for defining the legacy, simplified fuel system. By default this section will only show a couple of options, since it has been superseded by the Fuel System section, however you can still use it for basic aircraft where the modern fuel system is just too complicated and unnecessary by checking the appropriate checkbox.
- Use Legacy Fuel: Checking this will show the legacy/simplified options and hide the section with the Fuel System options. For more information on the legacy/simplified fuel parameters, please see here: Fuel.
- Fuel Type: The fuel type for the engines. Note that this parameter is the only one that is required for both the legacy/simplified fuel setup and the modern Fuel System setup. This parameter has the following options -
- OCTANE 100
- JET A
- OCTANE 80
- AUTO GAS
- JET B
Fuel System

This section is for defining the aircraft's fuel system in detail. The section is primarily for use in complex aircraft models where the simplified / legacy Fuel system doesn't give enough control or flexibility for the aircraft being created. The parameters within the simplified / legacy Fuel section should be used for simple aircraft or those that require a basic fuel system setup, or for maintaining old aircraft (like ones imported from FSX). However there is one exception: the Fuel Type parameter is required by the detailed fuel system, and should be set up here: Fuel.
This section is split into a number of sub-sections, and within each sub-section you can have multiple entries. For example in the Engine sub-section you may have four different engine settings (one for each engine on the aircraft).
At its most basic, the fuel system can be thought of as a series of "components" connected by "lines", with the simplest setup being a tank, a fuel line, and an engine. However you can create far more complex fuel system definitions that include multiple components like pumps, junctions, valves, etc... and multiple line connections between them. The system is also dynamic and can be set to respond to certain "trigger" conditions. For example, should a tank become empty, you can trigger an event to close the valve to that tank and open the valve to another tank.
NOTE: You can only connect components to lines and lines to components... You cannot connect two components or two lines together.
These different parts of the system are all setup using the appropriate values within the details required by each of the listed sections.
IMPORTANT: Connections between the different components are made using the "Name" parameter in the various sections, and so you should try and ensure a clear and consistent naming methodology to help keep the way that the different components connect as clear as possible.
In all the sub-sections listed below, clicking the + button will add a new component to the aircraft, and clicking the x button will remove the currently selected component, refactoring the component definitions so that they are still indexed in ascending order to fill in the "blank" index left by the deletion. Additionally the editor has a button to duplicate 🗐 the currently selected component, as well as re-order them using the ↑ button or ↓ button.
APU

This defines an APU for the fuel system. You can have multiple APU's per system, numbered from 1 upwards. When you add an APU component, you need to define the following parameters:
- Name: The internal name of the APU, which is used to reference it in other components and fuel lines.
- Title: The title of the APU to be displayed in the UI, if applicable.
- Fuel Burn Rate: The rate at which fuel will be burnt in Gallons per hour.
Engine
 Defines one or more engines (up to a maximum of 4) that form a part of the fuel system. When you add an engine component, you need to define the following parameters:
Defines one or more engines (up to a maximum of 4) that form a part of the fuel system. When you add an engine component, you need to define the following parameters:
- Name: The internal name of the engine, which is used to reference it in other components and fuel lines.
- Title: The title of the engine to be displayed in the UI, if applicable.
- Index: The index of the engine this fuel system component refers to. This would normally be the same as the index of the component, but can be different if required.
The following SimVar is available for this component:
Tank
 Defines one or more fuel tanks that form a part of the fuel system. When you add a tank component, you need to define the following parameters:
Defines one or more fuel tanks that form a part of the fuel system. When you add a tank component, you need to define the following parameters:
- Name: The internal name of the tank, which is used to reference it in other components and fuel lines.
- Title: The title of the fuel tank to be displayed in the UI, if applicable.
- Capacity: The capacity of the fuel tank, in Gallons.
- Unusable Capacity: The part of the total capacity that cannot be used, in Gallons.
- Position (Lat, Lon, Vert): The position of the tank relative to the Reference Datum Position. This parameter requires you to set the Longitude (Z), Latitude (X) and Vertical (Y) position - in ft - and you can enable the Show Gizmo option to visually position it.
- Input Lines: From here you can add fuel lines that input into the tank. Click on the
+button to add a line, then give the Name of the line to use as the input. Use thexbutton to remove a selected line. - Output Lines: From here you can add fuel lines as outputs from the tank. Click on the
+button to add a line, then give the Name of the line to use as the output. Use thexbutton to remove a selected line. - Drop Timer: Sets the timer that will be started when one of the
RELEASE_DROP_TANK_ALL,RELEASE_DROP_TANK_1orRELEASE_DROP_TANK_2events are called for the tank. This is the time - in seconds - that the user has to validate the jettison command for the tank (only valid for external tanks). - Priority: This controls the order in which fuel tanks are filled (when using the Fuel window in the simulation), as well as the order in which they will be used (when skipping in time). The higher the number the higher the priority and tanks with a higher priority will be filled first, and used last. For example: A tank with the priority 4 will be filled before a tank with priority 2 and after a tank with priority 5, and it will be used after the priority 2 tank but before the priority 5 tank.
- Pressure Curve: Here you can assign a Curve index. This curve will be used to ensure that the tank itself generates some line pressure depending on how full it is. The curve should be formatted as:
volume:psi, volume:psi, volume:psi, etc...
Volume is simply a Percent Over 100 where 0 is empty and 1 is full. For example, a curve of0:0, 1:15would mean that the tank will generate 15psi of pressure when full and then linearly go down to 0psi as the level goes down.
The following SimVars are available for this component:
FUELSYSTEM_TANK_CAPACITYFUELSYSTEM_TANK_LEVELFUELSYSTEM_TANK_QUANTITYFUELSYSTEM_TANK_TOTAL_QUANTITYFUELSYSTEM_TANK_WEIGHT
Line
 Defines one or more lines that form a part of the fuel system. When you add a line component, you need to define the following parameters:
Defines one or more lines that form a part of the fuel system. When you add a line component, you need to define the following parameters:
- Name: The internal name of the fuel line, which is used to reference it in other components.
- Title: The title of the fuel line to be displayed in the UI, if applicable.
- Source: A source component name, where fuel will flow from.
- Destination: A destination component name, where fuel will flow to.
- Fuel Flow: This is used to calculate the effect of pressure on fuel flow. Value is in lbs per second, and if not set will default to 0.1.
- Volume: This is the maximum amount of fuel that can be in the line at a given time. Value is in Gallons, and if not set will default to 0.24.
- Gravity Based Fuel Flow: This controls how fast the fuel will flow under gravity and also flag the line as being setup in such a way that even without pressure the fuel will naturally flow towards the destination. Value is in Gallons per hour.
The following SimVars are available for this component:
Junction
 Defines one or more junctions that form a part of the fuel system. When you add a junction component, you need to define the following parameters:
Defines one or more junctions that form a part of the fuel system. When you add a junction component, you need to define the following parameters:
- Name: The internal name of the junction, which is used to reference it in other components and fuel lines.
- Title: The title of the junction to be displayed in the UI, if applicable.
- Option: Junctions can have one or more option setting, and these can be added using the
+Add Key button (and removed using thexRemove Key button). When you add an option it should have at least one line name - although it can have more - and the line(s) given for each option will be set to open when its associated index is set, and all indexed lines will be set to closed. The order of definition of each Option corresponds to the index of the option, which is used by theFUELSYSTEM_JUNCTION_SETkey event to trigger them. If no options are defined then all connected lines will be considered as open. - InputOnlyLines: From here you can add fuel lines that input into the junction. Click on the
+button to add a line, then give the Name of the line to use as the input. Use thexbutton to remove a selected line. - Output Only: From here you can add fuel lines that output from the junction. Click on the
+button to add a line, then give the Name of the line to use as the output. Use thexbutton to remove a selected line.
The following SimVar is available for this component:
The following key Event is also available:
Valve
 Defines one or more valves that form a part of the fuel system. When you add a valve component, you need to define the following parameters:
Defines one or more valves that form a part of the fuel system. When you add a valve component, you need to define the following parameters:
- Name: The internal name of the valve, which is used to reference it in other components and fuel lines.
- Title: The title of the valve to be displayed in the UI, if applicable.
- Destination Line: The destination line for the valve. If not included, the valve will permit fuel flow in both directions, however if set, then fuel can only flow towards the destination line.
- Opening Time: The time, in seconds, that it takes the valve to open/close. Default value is 0.5.
- Circuit Index: The index of the electrical circuit that controls the valve. The circuit needs to be of the type
FUEL_VALVE(for more information, please see here: circuit.N - Type).IMPORTANT! This is not the index of the circuit itself, but the index of the circuit of the type
CIRCUIT_FUEL_VALVE.
The following SimVars are available for this component:
The following key Events are also available:
Pump

This sub-section defines one or more pumps that form a part of the fuel system. When you add a pump component, you need to define the following parameters:
- Name: The internal name of the pump, which is used to reference it in other components and fuel lines.
- Title: The title of the pump to be displayed in the UI, if applicable.
- Pressure: This is the pump pressure in psi. Minimum is 0 psi.
- Pressure Curve: This takes the index N value of a curve defined in the Curve section. The curve is the relationship between the percentage of maximum RPM of an engine and the percentage of maximum pressure provided by the pump (the maximum value being defined by the Pressure value). This curve is only used when the Type is set to "EngineDriven", and it will use the RPM of the engine given in the Index value.
- Tank Fuel Required: Sets whether the pump requires a fuel tank or not. If a fuel tank name is supplied here, then the pump will automatically shut down when the tank is empty.
- Destination Line: The line name supplied here sets the direction in which the pump is causing pressure.
- Type: Sets the type of pump that is being defined. The available strings for this key are:
- Electric - The pump is driven by an electrical circuit. The circuit used is set by the Index value.
- APUDriven - The pump is APU driven. Requires that the APU is running and will use fuel.
- EngineDriven - The pump is driven by an engine. The engine to be used is set by the Index value.
- Manual - The pump is a manual one and requires user interaction to generate pressure.
- Anemometer - The pump is driven by air input with pressure being based on the velocity of the aircraft. The anemometer to be used is set by the Index value.
- Index: An index value that corresponds to the following:
- For electric pumps it is the index of an electrical circuit of the type
CIRCUIT_FUEL_PUMP(not the circuit index itself). -
For engine pumps it is the index of the linked engine.
-
For anemometer pumps it is the index of an anemometer.
- For electric pumps it is the index of an electrical circuit of the type
- Auto Condition: If you fill in the details requested for this parameter, then you will be able to set the pump to "AUTO" mode, in which case it will only be enabled when the pressure of the fuel reaching the chosen engine goes below a specific threshold. The parameter requires two values: the name of the engine to link with the pump, and the threshold value (in psi).
- Pressure Decrease Rate: This key is only required when the Type is set to "Manual", and controls how much the pump pressure will decrease per second after the user stops interacting with it, expressed as a Percent Over 100. A good default value is 0.5 (so, a decrease of 50% per second).
The following SimVars are available for this component:
The following key Events are also available:
Trigger

This parameter is used to define one or more triggers to be used in the fuel system. Triggers are used to listen for - and react to - specific conditions and events that will affect the way the fuel system operates.
- Name: The internal name of the trigger, which is used to reference it elsewhere.
- Title: The title of the trigger to be displayed in the UI, if applicable.
- Target: The name of a component to target as part of the trigger condition. This information is only necessary when the given Condition requires it. Note that sometimes the condition will require two targets, in which case they should both be given separated by a comma.
- Threshold: The threshold above/below which the trigger is activated. This information is only necessary when the given Condition requires it.
- Index: A component index to target as part of the trigger condition. This value is only necessary when the given Condition requires it.
- Delay True: This is the time - in seconds - that the condition state must remain TRUE before the Effects True parameter gets triggered.
- Delay False: This is the time - in seconds - that the condition state must remain FALSE before the Effects False key gets triggered.
- Condition: The condition that the trigger is checking. This can be any one of the following strings:
Condition Description TankQuantityBelowChecks if the tank has a fuel quantity below the given Threshold (threshold in Gallons). Requires the Target parameter to be a tank name. TankQuantityAboveChecks if the tank has a fuel quantity above the given Threshold (threshold in Gallons). Requires the Target parameter to be a tank name. CGAboveLimitThis condition can be used to watch the value of the SimVar CG_PERCENTand then trigger once it goes above the limit set in the Threshold field (as a percentage).CGBelowLimitThis condition can be used to watch the value of the SimVar CG_PERCENTand then trigger once it goes below the limit set in the Threshold field (as a percentage).Autostart_EnabledChecks if autostart is enabled. Autoshutdown_EnabledChecks if autoshutdown is enabled. ManualThis is a manual trigger event that can only be triggered by using a Key Event. TankImbalanceAboveChecks if there is a relative fuel imbalance between two tanks above the given Threshold (threshold in Gallons). Requires the Target parameter to hold two tank names, eg:
#Target=TankLeft,TankRightTankImbalanceBelowChecks if there is a relative fuel imbalance between two tanks below the given Threshold (threshold in Gallons). Requires the Target parameter to hold two tank names (which should be separated by a comma).
TankAbsImbalanceAboveChecks if there is an absolute fuel imbalance between two tanks above the given Threshold (threshold in Gallons). Requires the Target parameter to hold two tank names (which should be separated by a comma).
TankAbsImbalanceBelowChecks if there is an absolute fuel imbalance between two tanks below the given Threshold (threshold in Gallons). Requires the Target parameter to hold two tank names (which should be separated by a comma).
JunctionOptionChangedRequires the Target parameter to be a junction name, and the Index parameter to be the Option in the junction to set. - Effect True: For each condition you can define one or more effects that will be performed when the condition resolves as TRUE. To add an effect click on the
+button (and use the-button to remove an effect), and then for each effect you need to select an effect type and a node which is the component in the system to apply the effect to (the name of the component). The available effect types are as follows:Condition Description OpenValveOpen the named valve. CloseValveClose the named valve. StartPumpStart the named pump. StopPumpStop the named pump. SetJunctionSet the named junction to a specific option. When using this event, it requires both a name and an option index, seperated by a point, eg: "FuelSelector.1" StartTriggerFlag the named trigger to start.
NOTE: Only for manual triggers.
StopTriggerFlag the named trigger to stop.
NOTE: Only for manual triggers.
- Effect False: For each condition you can define one or more effects that will be performed when the condition resolves as FALSE. To add an effect click on the
+button (and use the-button to remove an effect), and then for each effect you need to select an effect type and a node which is the component in the system to apply the effect to (the name of the component). The available effect types are the same as those listed for Effect True, above.
The following SimVar is available for this component:
The following key Events are also available:
Curve

The curve parameter is essentially a table of one or more paired values, and you can create multiple curves with an incremental index value, eg: Curve.1, Curve.2, Curve.3, etc... To add a new curve you click on the + button and then you can go ahead and start adding value pairs. The exact number of paired values that are in the curve will depend on the use the curve is going to get, since curves are used by other parameters to store information, and values are added by clicking on the + button and then filling in the Value1 and Value2 fields. You can remove value pairs by clicking on the - button, and you can remove a curve by clicking the x button.
Airplane Geometry

NOTE: This section is not rerquired when you have selected "Helicopter" as the aircraft Category.
This section is for defining the geometry of an aircraft, which is an important part of the Microsoft Flight Simulator engine since the flying physics will use, in a large part, the aircraft geometry to simulate the interaction between the SimObject and the physical world. Note that you can find further information on the physics behind this section from the following page:
You can also find a helpful tutorial on the basics of setting up the aircraft geometry from the following page:
The available parameters this section are listed below:
- Area: Total area of the top surface of the wing from tip-to-tip, in sqft. The wing area impacts the target lift and drag forces. For example it directly impacts lift proportionally to the area:
\(L = 0.5 \times p \times v \times v \times WingArea \times C_L\)
- Span: The horizontal distance between the two wing tips, in ft. The wing span impacts the distribution of the forces over the aircraft, and the larger the wing span the greater the increase in the roll and yaw moment of ailerons and also the resistance to the roll movement of the aircraft.
- Root Chord: Length of the wing Chord at the intersection of the wing and the fuselage, in ft. The chord over the wing will be automatically computed based on the area, the span and the chord at the root. To get a rectangle shaped wing, enter the average chord into the root chord. To get a triangle shaped wing enter a root chord larger than the average chord.
- Camber: The wing Camber, in degrees. Wing camber here means the difference in virtual incidence or slope between the back region of the wing and the front region of the wing. A wing with a lot of camber has a big curve while a wing with less camber is more streamlined. Wing camber mostly has an impact on the pitch moment generated at various wing incidences as well as on the position of the aerodynamic center.
- Thickness Ratio: The wing local thickness, in ft, calculated as:
\( \textrm{local_chord}(x) \times \textrm{wing_thickness_ratio} \)
where:
\( x = \textrm{lateral coord} \)
- Dihedral: The Dihedral is the angle between the wing leading edge and a horizontal line parallel to the ground, as seen when looking at the front of an aircraft. Technically defined as the dihedral angle Lambda, in degrees. The wing dihedral impacts secondary effects such as induced roll and adverse yaw.
- Virtual Dihedral: Sets the "virtual" Dihedral. This values is added to the actual dihedral value, but without moving the surface, proportional to the vertical position of the wing. Note that high wings have more positive virtual dihedral, and low wings have more negative virtual dihedral. You can use this parameter to simulate the pressure build up between wing and fuselage when side slipping.
- Incidence: This is the angle (in degrees) the mean wing Chord makes with a horizontal line parallel to the ground, as seen when looking at the side of an aircraft from the wing tip.This base wing incidence is calculated when the aircraft surfaces are initially "built" in the simulation and before the normalization of the lift table. The base incidence impacts the zero AoA lift and should be set as closely as possible to the real wing incidence so that the normalization has as little work to do in order to reach the target lift polar. The normalization will readjust this incidence in order to match the target lift coefficient.
- Twist: This is the difference in wing incidence from the root Chord and the tip Chord of the wing (in degrees). Technically defined as the wing twist epsilon. Most aircraft have twisted wings in order to increase aileron authority close to and during a stall. This also causes higher incidences towards the root of the wing and will cause these regions to stall earlier, which will cause more symmetrical stalls.
- Oswald Efficiency Factor: The wing Oswald Efficiency Factor (non dimensional) measures the aerodynamic efficiency of the wing, where a theoretically perfect wing will have a factor of 1.0. This is the "e" in:
\( C_{Di} = \frac {(C_L)^2} {pi \times AR \times e} \)
While the aspect ratio is defined by the geometry, this factor impacts the induced drag, and most planes have an Oswald factor in the order of 0.7.
- Winglets Flag: When checked, it tells the simulation that the aircraft has winglets. This parameter is not directly used to define the aircraft geometry, however if the aircraft goes through the normalization process that normalizes the performance to the desired drag, then that drag value will include the winglet drag if it is enabled using this parameter.
- Sweep: The angle of the wing with the lateral axis. This is the angle the leading edge of the wing makes with a horizontal line perpendicular to the fuselage, as seen when looking down on top of an aircraft (expressed in degrees).Wing sweep has an important impact on secondary effects but also on the location of the wing on the longitudinal axis. The wing will be positioned to align the default 25% aerodynamic center with the Aero Center Lift value and a swept wing will have the root in front of the aerodynamic center while the tip will be in the back. The wing will be automatically skewed to align with the target aerodynamic center position.
- Wing Pos Apex Vert: Vertical (y) distance of the wing apex - as measured at the centerline of the aircraft - from the Reference Datum Position in ft. This distance is measured positive in the "up" direction.
- Wing Min Drag Incidence: This sets the aircraft AoA at which the wing's parasitic drag is minimal (lift induced drag is always minimal when lift is minimal).
- Horizontal Tail Area: This is the area of the static part of the horizontal stabilizer (not counting the elevator area), in sqft. The horizontal stabilizer and elevator will be simulated as a single wing with surfaces positioned in a way that the overall incidence matches the current control surface deflection. This single surface will have the area of Horizontal Tail Area and Elevator Area combined. However, we recommend entering the exact area of each surface. This area will impact the pitch moment caused by the elevator deflection as well as the pitch moment caused by the horizontal stabilizer.
- Horizontal Tail Span: The horizontal span of the horizontal tail and elevator surface, in ft. A large horizontal tail span will impact the roll moment of the propeller wash but also resist the aircraft roll movement.
- Horizontal Tail Pos Lon: Longitudinal (z) distance of the horizontal tail apex and elevator surface - as measured at the centerline of the aircraft - from the Reference Datum Position in ft. This distance is measured positive in the forward (aircraft nose) direction.The longitudinal position of the horizontal tail impacts the pitch moment of the horizontal tail and elevator surfaces. The horizontal tail force vectors should be aligned with the real surface.
- Horizontal Tail Pos Vert: Vertical (y) distance of the horizontal tail apex and elevator surface - as measured at the centerline of the aircraft - from the Reference Datum Position in ft. This distance is measured positive in the "up" direction. Depending on the vertical position of the horizontal tail, it can get into turbulence created by the wing located in front of it. In extreme situations this can create a deep and unrecoverable stall.
- Horizontal Tail Incidence: The default incidence of the horizontal tail and elevator surface combination. This is the angle the mean horizontal tail Chord makes with a horizontal line parallel to the ground, as seen when looking at the side of an aircraft from the horizontal tail tip (in degrees).
The aircraft surfaces will be build with this default incidence setting and all performance normalization will be calculated with this incidence. This means that the target lift and drag coefficients will match the aircraft with this horizontal tail incidence default elevator angle. Any other elevator angle will generate different drag and lift coefficients.
We recommend setting the horizontal tail incidence so that the aircraft flies level at cruise speed without any required elevator input and zero elevator trim. This means that the horizontal tail incidence will be the neutral trim for cruise speed. By doing this the lift and drag coefficients of the aircraft will perfectly match the target values during cruise and the drag force will be the most accurate and match the target performance during cruise. This also means that during any other phase, the drag performance of the aircraft won't perfectly match the target formula because of the added drag caused by the added elevator deflection required to maintain a level flight at any other speed. This target formula is expressed as:
\( {C_D} = {C_{D0}} + K(C_L - C_{L0})^{2} \)
However, it is possible to chose a different speed than cruise and set the horizontal tail incidence for that speed.
- Horizontal Tail Sweep: This is the angle the horizontal tail leading edge makes with a horizontal line perpendicular to the fuselage, as seen when looking down on top of an aircraft (in degrees)
- Horizontal Tail Thickness Ratio: The horizontal tail local thickness, calculated as:
\( \textrm{local_chord(x)} \times \textrm{htail_thickness_ratio} \)
where:
\( x = \textrm{lateral coord} \)
- Aileron To Elevator Gain: Scales the elevator deflection angle in relation to the aileron deflection angle.
- Vertical Tail Area: The fuselage-to-tip area of the static part of the vertical stabilizer (not counting the rudder area), in sqft. The vertical stabilizer and rudder will be simulated as a single wing with surfaces positioned in a way such that the overall incidence matches the current control surface deflection. This single surface will have the area of vertical tail area and Rudder Area combined. However, we recommend entering the exact area of each surface. This area will impact the yaw moment caused by the rudder deflection as well as the yaw moment caused by the vertical stabilizer.
- Vertical Tail Span: The vertical tail span is the vertical distance from the vertical tail-fuselage intersection to the tip of the vertical tail, in ft. A large vertical tail span will impact the roll moment of the propeller wash but also resist the aircraft roll movement. It will also counter adverse yaw and counter induced roll during rudder inputs.
- Vertical Tail Sweep: This is the angle the vertical tail leading edge makes with a vertical line perpendicular to the fuselage, as seen when looking at the side of the vertical tail (in degrees).
- Vertical Tail Pos Lon: Longitudinal (z) position of the vertical tail and rudder surface - as measured at the centerline of the aircraft - from the Reference Datum Position in ft. This distance is measured positive in the forward (aircraft nose) direction. The longitudinal position of the vertical tail impacts the yaw moment of the vtail and rudder surfaces. The vertical tail force vectors should be aligned with the real surface.
- Vertical Tail Pos Vert: Vertical position of the vertical tail and rudder surface - as measured at the centerline of the aircraft - from the Reference Datum Position in ft. This distance is measured positive in the "up" direction. Depending on the vertical position of the vertical tail , it can get into turbulence created by the wing located in front of it. The vertical position of the vertical tail will impact the roll moment created by the surface.
- Vertical Tail Thickness Ratio: The vertical tail local thickness in ft, calculated as:
\( \textrm{local_chord}(x) \times \textrm{vtail_thickness_ratio} \)
where
\( x = \textrm{lateral coord} \)
- Fuselage Length: The fuselage length from nose to tail, in ft.
- Fuselage Diameter: The fuselage diameter, in ft.
- Fuselage Center Pos: The fuselage center, defined by the latitude, longitude and vertical offset from the Reference Datum Position, in ft. Note that you can check the Show Gizmo to place this location visually in the simulation.
- Fuselage Min Drag Incidence: Aircraft AoA at which the fuselage's drag is minimal.
- Elevator Area: Area of the moving part of the horizontal stabilizer (not counting the horizontal tail area), in sqft.The horizontal stabilizer and elevator will be simulated as a single wing with surfaces positioned in a way that the overall incidence matches the current control surface deflection. This single surface will have the area of Horizontal Tail Area and elevator area combined. However, we recommend entering the exact area of each surface. This area will impact the pitch moment caused by the elevator deflection as well as the pitch moment caused by the horizontal stabilizer.
- Rudder Area: Area of the moving part of the vertical stabilizer (not counting the vtail area),in sqft.The vertical stabilizer and rudder will be simulated as a single wing with surfaces positioned in a way that the overall incidence matches the current control surface deflection. This single surface will have the area of vtail_area and rudder_area combined. However, we recommend entering the exact area of each surface. This area will impact the yaw moment caused by the rudder deflection as well as the yaw moment caused by the vertical stabilizer.
- Elevator Up Limit: Upper angular limit of the elevator and horizontal tail combined control surface, in degrees. This should be the maximum elevator deflection angle possible and will be scaled down by the elasticity table and the Elevator Max Angle Scalar.
- Elevator Down Limit: Lower angular limit of the elevator and horizontal tail combined control surface, in degrees (absolute values only). This should be the maximum elevator deflection angle possible and will be scaled down by the elasticity table and the Elevator Max Angle Scalar.
- Aileron Up Limit: Upper angular limit of the aileron and wing combined control surface, in degrees.This should be the maximum aileron deflection angle possible and will be scaled down by the elasticity table and the Aileron Effectiveness.
- Aileron Down Limit: Lower angular limit of the aileron and wing combined control surface, in degrees (absolute values only).This should be the maximum aileron deflection angle possible and will be scaled down by the elasticity table and the Aileron Effectiveness. An excessive aileron down limit may increase the chance of the related wing surface stalling.
- Aileron Span Outboard: The outboard aileron span, expressed as a Percent Over 100. This is the ratio of wing length from the tip to the end of the aileron surface. A larger aileron will increase the roll moment of aileron deflection, but it will also increase the local drag generated by aileron deflection.
- Rudder Limit: Angular limit in degrees (absolute values only) of the rudder and vertical tail combined control surface. This should be the maximum rudder deflection angle possible and will be scaled down by the elasticity table and the Rudder Max Angle Scalar.
- Rudder_Trim_Limit: Angular limit in degrees (absolute values only) of the rudder trim.This deflection adds to the rudder deflection. This should be the maximum rudder trim deflection angle possible and will be scaled down by the elasticity table and the Rudder Trim Effectiveness.
- Elevator Trim Limit: Angular limit in degrees of the elevator trim. This deflection adds to the elevator deflection. This should be the maximum elevator trim deflection angle possible and will be scaled down by the elasticity table and the Elevator Trim Effectiveness. Note that this value can be overridden by the Elevator Trim Up Limit and Elevator Trim Down Limit parameters. If this value is omitted and the Elevator Trim Up Limit and Elevator Trim Down Limit have not been set, then the default behavior will be to have no elevator trim applied.
- Elevator Trim Up Limit: Set the upper limit of the elevator trim deflection that makes the aircraft pitch up, in degrees (absolute values only). Note that this will override the value set in Elevator Trim Limit, and will be scaled down by the elasticity table and the Elevator Trim Effectiveness. If this parameter is omitted, then the Elevator Trim Limit value will be used, and if that parameter is also omitted, then the no elevator trim will be applied.
- Elevator Trim Down Limit: Set the lower limit of the elevator trim deflection that makes the aircraft pitch down, in degrees (absolute values only). Note that this value cannot be greater than the value set in Elevator Trim Up Limit, and will override the value set in Elevator Trim Limit. It will also be scaled down by the elasticity table and the Elevator Trim Effectiveness. If this parameter is omitted, then the Elevator Trim Limit value will be used, and if that parameter is also omitted, then the no elevator trim will be applied.
- Spoiler Limit: This sets the angular limit of the wing spoilers on an aircraft, in degrees (absolute values only), when on the ground. If this limit is 0, no spoilers exist for the aircraft.
- Air Spoiler Limit: Angular limit in degrees of the spoiler and wing combined control surface, in degrees (absolute values only) when in the air.If set then this limit allows you to define a different limit when in air, than when on the ground. If this value is not set, then it will default to the Spoiler Limit value.
- Spoilerons Available: When this option is checked it indicates that the spoilers should also behave as spoilerons for roll control (if spoilers are available). Spoilerons will add spoiler deflection to aileron deflection based on Aileron To Spoileron Gain and Min Ailerons For Spoilerons.
- Aileron To Spoileron Gain: Scales the spoileron deflection angle in relation to the aileron deflection angle set with Min Ailerons For Spoilerons (if Spoilerons Available is TRUE).
- Min Ailerons For Spoilerons: This value is used to indicate at what minimum aileron deflection angle the spoilers become active for roll control, in degrees (absolute values only). Based on Aileron To Spoileron Gain.
- Min Flaps For Spoilerons: This value is used to indicate the minimum flap handle position where the spoilerons become active, in degrees (absolute values only).
- Spoiler Extension Time: Time, in seconds, necessary to fully extend the spoilers.
- Spoiler Handle Available: When checked, this configures the airplane with manual controls for the spoiler deflections.
- Spoiler Disabled By Flaps: When checked, the spoilers will automatically retract when the flaps are extended.
- Auto Spoiler Auto Retracts: When checked, the spoilers will automatically retract when the plane speed goes below Auto Spoiler Min Speed.
- Auto Spoiler Available: When checked, this sets auto spoilers as being available.
- Positive G Limit Flaps Up: The flap positive load limit when up. Same dimension as gravity vector, in ft per second². The aircraft will crash if the load factor reaches the G limit calculated using this parameter (For more information please see here: Overstress Damage). An aircraft with a load factor hold fly by wire system, will respect these limits as load factor limits.
- Positive G Limit Flaps Down: The flap positive load limit when down. Same dimension as gravity vector, in ft per second². The aircraft will crash if the load factor reaches the G limit calculated using this parameter (For more information please see here: Overstress Damage). An aircraft with a load factor hold fly by wire system, will respect these limits as load factor limits.
- Negative G Limit Flaps Up: The flap negative load limit when up. Same dimension as gravity vector, in ft per second². The aircraft will crash if the load factor reaches the G limit calculated using this parameter (For more information please see here: Overstress Damage). An aircraft with a load factor hold fly by wire system, will respect these limits as load factor limits.
- Negative G Limit Flaps Down: The flap negative load limit when down. Same dimension as gravity vector, in ft per second². The aircraft will crash if the load factor reaches the G limit calculated using this parameter (For more information please see here: Overstress Damage). An aircraft with a load factor hold fly by wire system, will respect these limits as load factor limits.
- Load G Limiter G: This is the multiplier on top of the design limits before which damage will begin to accrue. It is used by the autopilot and FBW systems as part of the pitch control limiter.
- Elevator Trim Neutral: For many aircraft this will be the take off trim setting. The aircraft will start with this trim setting when starting on the ground. This trim setting is not used for performance normalizations nor to achieve the target lift and drag values, and is used for indicators only. The Horizontal Tail Incidence will be used for performance normalization.
- Aileron To Rudder Scale: The aileron to rudder ratio, used to link the two. If set to a value other than 0, the rudder will be controlled by the aileron controller axis instead of the rudder controller axis. The scale defines the ratio between the aileron input applied to the rudder and the original aileron input.
- Flap To Aileron Scale: The scale defines the ratio of aileron deflection based on flap deflection. Will deflect ailerons when flaps are extended.
- Fly By Wire: Sets whether fly-by-wire is available (checked) or not (unchecked). A fly by wire control system disconnects the direct connection between yoke and rudder inputs and the control surfaces and adds a computer in between. This allows to activate control modes such as load factor hold.
NOTE: When enabled your aircraft may use the Stall Protection system.
- Fly By Wire From Flaps: Set's the aircraft fly-by-wire mode. When unchecked, the fly-by-wire will be in load factor hold mode above 50ft and in direct mode below 50ft. When checked, the fly-by-wire will be in load factor hold mode when flaps are retracted and in direct mode when flaps are extended.
- Controls Reactivity Scalar: The reactivity scalar for all controls, which can be used to adjust - at a global level - the responsiveness and behaviour of the control system. This value is clamped to a maximum of 1, regardless of what the actual input is set to.
Elevator Elasticity Table
 This section permits you to create a table which you can use to scale down the elevator control surface deflection angle depending on the current dynamic pressure. The table has the following inputs:
This section permits you to create a table which you can use to scale down the elevator control surface deflection angle depending on the current dynamic pressure. The table has the following inputs:
- Dynamic Pressure: With the dynamic pressure (expressed in psf) being airspeed dependent, this table allows you to reduce deflection based on speed. The [Dev Mode] aircraft debugging tools allow you to get the current dynamic pressure from the Speed debug window. The dynamic pressure can also be obtained with the following formula:
\( \textrm{dynamicpressure} = 0.5 \times \textrm{airdensity} \times \textrm{airspeed} \times \textrm{airspeed} \) - Correction Factor: The yoke correction factor to be applied, expressed as a Percent Over 100.
To add elements to the table - up to a maximum of 5 - you can click the + button at the bottom, and you can remove the last element added using the - button.
Aileron Elasticity Table
 This section permits you to create a table which you can use to scale down the aileron control surface deflection angle depending on the current dynamic pressure. The table has the following inputs:
This section permits you to create a table which you can use to scale down the aileron control surface deflection angle depending on the current dynamic pressure. The table has the following inputs:
- Dynamic Pressure: With the dynamic pressure (expressed in psf) being airspeed dependent, this table allows you to reduce deflection based on speed. The [Dev Mode] aircraft debugging tools allow you to get the current dynamic pressure from the Speed debug window. The dynamic pressure can also be obtained with the following formula:
\( \textrm{dynamicpressure} = 0.5 \times \textrm{airdensity} \times \textrm{airspeed} \times \textrm{airspeed} \) - Correction Factor: The yoke correction factor to be applied, expressed as a Percent Over 100.
To add elements to the table - up to a maximum of 5 - you can click the + button at the bottom, and you can remove the last element added using the - button.
Rudder Elasticity Table

This section permits you to create a table which you can use to scale down the rudder control surface deflection angle depending on the current dynamic pressure. The table has the following inputs:
- Dynamic Pressure: With the dynamic pressure (expressed in psf) being airspeed dependent, this table allows you to reduce deflection based on speed. The [Dev Mode] aircraft debugging tools allow you to get the current dynamic pressure from the Speed debug window. The dynamic pressure can also be obtained with the following formula:
\( \textrm{dynamicpressure} = 0.5 \times \textrm{airdensity} \times \textrm{airspeed} \times \textrm{airspeed} \) - Correction Factor: The yoke correction factor to be applied, expressed as a Percent Over 100.
To add elements to the table - up to a maximum of 5 - you can click the + button at the bottom, and you can remove the last element added using the - button.
Elevator Trim Elasticity Table

This section permits you to create a table which you can use to scale down the elevator control surface deflection angle depending on the current dynamic pressure. The table has the following inputs:
- Dynamic Pressure: With the dynamic pressure (expressed in psf) being airspeed dependent, this table allows you to reduce deflection based on speed. The [Dev Mode] aircraft debugging tools allow you to get the current dynamic pressure from the Speed debug window. The dynamic pressure can also be obtained with the following formula:
\( \textrm{dynamicpressure} = 0.5 \times \textrm{airdensity} \times \textrm{airspeed} \times \textrm{airspeed} \) - Correction Factor: The yoke correction factor to be applied, expressed as a Percent Over 100.
To add elements to the table - up to a maximum of 5 - you can click the + button at the bottom, and you can remove the last element added using the - button.
Aerodynamics

NOTE: This section is not required when you have selected "Helicopter" as the aircraft Category.
This section is for defining the aerodynamics of an aircraft. You can find further information on the physics behind this section from the following page:
You can also find a helpful tutorial on the basics of setting up the aircraft geometry from the following page:
The available parameters in this section are:
- CFD Enable Simulation: This can be used to enable (when checked) the use of CFD within the simulation. For more information, please see here: Debug Aircraft CFD.
- CFD Re-inject Body: This can be used to enable (when checked) the re-injection of the CFD output with that of the flight model, specifically affecting the airframe surface. Note that this needs to be checked for CFD Re-inject Rotors, CFD Re-inject Vertical Tail X, and CFD Re-inject Horizontal Tail Y to be visible and work as well. If this is unchecked, then those parameters will have no effect. For more information, please see here: Debug Aircraft CFD.
- CFD Re-inject Rotors: When checked this will enable the re-injection of the CFD output with that of the flight model for rotors/propellers. Note that this parameter will not be visible (and will have no effect) if the CFD Re-inject Body parameter is not checked. For more information, please see here: Debug Aircraft CFD.
IMPORTANT! This requires that you have the Use Modern Propeller Model parameter checked.
- CFD Re-inject Vertical Tail X: When checked this will enable the re-injection of the CFD output with that of the flight model, specifically affecting the tail control surfaces. Note that this parameter will not be visible (and will have no effect) if the CFD Re-inject Body parameter is not checked. For more information, please see here: Debug Aircraft CFD.
- CFD Re-inject Horizontal Tail Y: When checked this will enable the re-injection of the CFD output with that of the flight model, specifically affecting the tail control surfaces. Note that this parameter will not be visible (and will have no effect) if the CFD Re-inject Body parameter is not checked. For more information, please see here: Debug Aircraft CFD.
- CFD Air Viscosity: Sets the air viscosity when the CFD simulation is active. This is essentially the viscosity term of the Navier Stokes equations used by the CFD simulation, and it sets the rate at which the airspeed of a voxel will tend to the average airspeed of the surrounding voxels. The value will only be visible and used when the CFD Enable Simulation parameter is checked. For more information, please see here: Debug Aircraft CFD.
- CFD Air In-compressibility: Sets the air in-compressibility when the CFD simulation is active. This is essentially the divergence term of the the Navier Stokes equations used by the CFD simulation, and sets the rate at which the pressure of a voxel will be impacted by the local divergence. The value will only be visible and used when the CFD Enable Simulation parameter is checked. For more information, please see here: Debug Aircraft CFD.
- CFD Voxel Size: Sets the scale of the voxel volume for CFD simulation. At 1, this will create a volume that is 150% that of the aircraft wingspan, and the volume will be comprised of n³ voxels (where n is set by the CFD Voxel Number parameter). The value will only be visible and used when the CFD Enable Simulation parameter is checked. For more information, please see here: Debug Aircraft CFD.
- CFD Voxel Number: This can be used to set the number of voxels that will be cubed to make the sample volume for the CFD simulation.
IMPORTANT! This may have a serious impact on performance if set to values greater than the default value, due to it currently having a time complexity of O(n3). The value will only be used when the CFD Enable Simulation parameter is checked. For more information, please see here: Debug Aircraft CFD.
- CFD Ground Collision Voxel Offset: This parameter allows you to offset the ground collision vertically by N voxels. With a value of 0 voxels, the ground collision lets the air penetrate up to 1 voxel into the ground, ie: the ground is a "soft collision layer" of about 1 voxel thickness that starts at ground level and ends 1 voxel into the ground. By setting this to 1 voxel, the soft ground collision starts 1 voxel above the ground and stops airflow before it touches the ground. Adjusting this value will have an impact on the strength of the ground effect that is applied on the aircraft. The value will only be used when the CFD Enable Simulation parameter is checked. For more information, please see here: Debug Aircraft CFD.
- Pitch Rate: Defines how much lift will be added to the overall lift formula based on the current pitch rotation speed. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- DAoA: Defines how much lift will be added to the overall lift formula based on the current angle of attack variation rate. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- dE Delta Elevator: Defines how much lift will be added to the overall lift formula based on the current elevator deflection angle. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- AoL - Hor. Incidence: Defines how much lift will be added to the overall lift formula based on the current yaw angle of the aircraft. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Lift Coef Flaps: Defines the lift coefficient that will be added to the target lift coefficient obtained with the of the airplane when at maximum flap expansion.
- Lift Coef Spoilers: Defines the lift coefficient that will be added to the target lift coefficient obtained with the of the aircraft when at maximum spoiler expansion on the ground. This allows you to correctly tune the spoilers for ground usage where there is very strong drag and very strong loss in lift.
- Lift Coef Air Spoilers: Defines the lift coefficient that will be added to the target lift coefficient obtained with the of the aircraft when at maximum spoiler expansion in the air. This allows you to correctly tune the spoiler behaviour in the air where you have strong drag, and little loss in lift.
- Drag Coef Zero Lift: Defines the target drag of the airplane in clean configuration (ie: no propeller, no turbulence, no engine wash, no gears, no flaps, no spoilers, no deflections...), when there is zero lift. This is usually also called the \(C_{D0}\) or \(C_{DZeroLift}\). Zero lift may occur at an angle of attack of zero - reason for which \(C_{D0}\) is sometimes the drag at an AoA of 0 - but most of the time, zero lift occurs at an angle of attack that is negative and the \(C_{D0}\) does not correspond to the drag at AoA 0.In the legacy FSX flight model, this defines the actual \(C_{D0}\). In the modern flight model, this defines the target \(C_{D0}\) that will be distributed over all the surfaces of the aircraft when building the airplane used in the aerodynamic surface simulation. Once the aircraft is built, it will then be normalized to match exactly the target \(C_{D0}\).
- Drag Coef Flaps: Defines the target drag added when flaps are fully extended. In the legacy FSX flight model, this defines the actual flap drag. In the modern flight model, this defines the target flap drag that will be distributed over all the flap surfaces of the aircraft when building the airplane used in the aerodynamic surface simulation. Once the aircraft is built, it will then be normalized to match exactly the target flap drag.
- Drag Coef Gear: Defines the drag of the gears that will be applied at the location of the gear contact points and create the appropriate angular moment.If the aircraft features retractable gears, this coefficient will be zero once the gears are retracted. For non retractable gears this will always be present. All aircraft which feature gears, retractable or not, should define a drag coefficient for gears. This drag coefficient should not be baked into the Drag Coef Zero Lift otherwise the gear angular moment calculations will be wrong. Also note that if the aircraft has no landing gear, this value will STILL have an effect and as such should be set to 0 in those cases.
- Drag Coef Spoilers: Defines the target drag added when spoilers are fully extended on the ground, where there is very strong drag and very strong loss in lift. In the legacy FSX flight model, this defines the actual flap drag. In the modern flight model, this defines the target spoiler drag that will be distributed over all the spoiler surfaces of the aircraft when building the airplane used in the aerodynamic surface simulation. Once the aircraft is built, it will then be normalized to match exactly the target spoiler drag.
- Drag Coef Air Spoilers: Defines the target drag added when spoilers are fully extended in the air, where you have strong drag, and little loss in lift.
- Stall Start Ratio: The ratio of the stall AoA at which the airflow will start detaching from the wing.
- Stall End Ratio: The ratio of the stall AoA at which the airflow will be completely detached from the wing.
- Stall Curve Power: The power of the ratio curve that controls the airflow detaching from the wing between start and end.
- Stall Min Transition: The minimum angle, in radians, between the stall AoA at which the airflow starts detaching and at which it is fully detached.
- Stall Airflow Detach Speed: The speed at which the airflow will be detaching, in ratios per second.
- Stall Airflow Attach Speed: The speed at which the airflow will be attaching, in ratios per second.
- Stall Aileron Add Incidence: The degrees added to the stall AoA at the ailerons.
- Stall Tip Add Incidence: The degrees added to the stall AoA at the wingtips.
- Stall Tip Add Twist: The amount of virtual added wing twist to reduce stall at the root of the wing.
- Stall Twist Add Ratio: The scale ratio of the virtual added wing twist.
- Fuselage Rigidity: This parameter sets the rigidity of the fuselage. If set to -1 then the fuselage will be considered as having "infinite" rigidity, while values greater than 0 will mean that applied forces will affect the airframe. The approximate value for this parameter can be calculated as follows: fuselage rigidity = distance from the CG in ft at which a force applied yields 50% of it's effect on the entire airframe after 1 second. Note that low rigidity will increase the aircraft oscillations, and if the rigidity is low enough for the time accumulation to correspond to the oscillation frequency, then you can even get a situation of resonance that will cause the entire airframe to "flutter" wildly.
- Fuselage Inertia: This parameter sets the inertia for the fuselage, and works in harmony with the Fuselage Rigidity parameter. However, if that parameter is less than or equal to zero, then this parameter will have no effect. Generally you want to set this to 1 to start with then tweak it up or down to get the aircraft behaviour that you require.
- Presspt FWD Alpha0 pMAC: Defines an additional forward offset applied to the overall pressure center of the wing when the wing surface is at an AoA of 0. The offset is defined as a ratio of the local Mean Aerodynamic Chord and negative values indicate a backwards offset.
- Presspt FWD AlphaStall pMAC: Defines an additional forward offset applied to the overall pressure center of the wing when the wing surface is at an the stall AoA. The offset is defined as a ratio of the local Mean Aerodynamic Chord and negative values indicate a backwards offset.
- Presspt FWD AlphaHiStall pMAC: Defines an additional forward offset applied to the overall pressure center of the wing when the wing surface is at high above the stall AoA (during a stall). The offset is defined as a ratio of the local Mean Aerodynamic Chord, and negative values indicate a backwards offset.
- Side Force Slip Angle: Defines how much side force will be generated when the yaw angle is non zero (during a side slip). This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Roll Rate: Defines how much side force will be generated when the aircraft has some roll speed (during a roll). This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Yaw Rate: Defines how much side force will be generated when the yaw angle is changing.This is a legacy FSX parameter not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Delta Rudder: Defines how much side force will be generated when the rudder is deflected. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use Rudder Lift Coef to modify the forces generated by the rudder deflection.
- Horizontal Incidence: Defines how much pitch moment will be generated when the aircraft is yawing. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use the rudder trim and, rudder area and rudder vertical position to modify the pitch moment generated generated by the rudder at zero deflection.
- Delta Elevator: Defines how much pitch moment will be generated when the elevator is deflected. Note that while this is a legacy FSX parameter and the actual value here is not normally used in the modern flight model, the sign of the value is used and it is necessary to set a value other than 0 for the autopilot (see the notes below). In the modern flight model, use the Elevator Lift Coef, elevator longitudinal position and elevator area to adjust this effect.
NOTE: The absolute value of this parameter is ignored by the modern flight model but it's sign is used to invert the elevator input angle when it is negative. This may be useful for aircraft that need an inverted elevator (elevator in the front).NOTE: Even in the modern flight model, the autopilot system may still use this variable to calculate the elevator deflection necessary to find a required pitch moment. The PID will usually compensate for wrong values, but this variable cannot be set to zero or very far off and must be relatively close to reality. You can use the legacy flight model tool to calculate the correct value that will then usually work with the autopilot.
- Delta Trim: Defines how much pitch moment will be generated when the elevator trim is deflected. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use the Elevator Lift Coef, elevator longitudinal position and elevator area, and scale the trim effect to adjust this effect.
- Pitch Damping: Defines how much the pitch velocity will be dampened when the plane is pitching. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use the Elevator Lift Coef, elevator longitudinal position, Fuselage Lateral CX, and elevator area to adjust this effect. The wings and even the rudder may also contribute to this effect.
- A0A 0: Defines how much the pitch moment will be generated at AoA 0. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use the Horizontal Tail Incidence as the primary variable to impact the 0 AoA pitch moment.
- DAoA: Defines how much the alpha velocity will be dampened when the plane is changing incidence. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use the Elevator Lift Coef, elevator longitudinal position, Fuselage Lateral CX, and elevator area to adjust this effect. The wings and even the rudder may also contribute to this effect.
- Pitch Moment Flaps: Defines how much pitch moment will be generated when the flaps will be deflected. In the modern flight model, refer to the flaps documentation to see how to move the flap lift on the longitudinal axis in order to control the pitch moment at each flap level.
- Pitch Moment Gear: Defines how much the pitch moment will be generated because of the gears. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use the Drag Coef Gear and the position of the gear contact points to change the angular moments generated by gears.
- Pitch Moment Spoilers: Defines how much pitch moment will be generated when the spoilers will be deflected. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, this will be automatically simulated and there is no way yet to change the pitch moment generated by spoilers. It will be an automatic effect of the spoiler deflection and mostly dependent on the drag generated by the spoilers and the vertical position of the wings.
- Delta Elevator Propwash: Defines how much pitch moment will be generated when the elevator is deflected and there is a propeller spinning (prop wash). This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model this is automatically simulated based on how air is accelerated by the propeller and blown onto the control surfaces. However one can use the Elevator Lift Coef, elevator longitudinal position and elevator area to adjust this effect. In the modern flight model, this effect only works if the propeller is blowing air onto the control surfaces. If the propeller is under a wing, far from any surface, this effect will not occur.
- Pitch Propwash: Defines how much pitch moment will be generated when the plane is pitching and there is a propeller spinning (prop wash). This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model this is automatically simulated based on how air is accelerated by the propeller and blown onto the control surfaces. However one can use the Elevator Lift Coef, elevator longitudinal position and elevator area to adjust this effect. In the modern flight model, this effect only works if the propeller is blowing air onto the control surfaces. If the propeller is under a wing, far from any surface, this effect will not occur.
- Roll Moment Slip Angle: Defines how much roll moment will be generated when the aircraft is yawing or side slipping. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, most of the roll will be induced by the difference in lift between one wing and the other, and the rudder will work against this effect. Adjust the shape of the wing via Sweep, Dihedral, Twist, Camber, the position of the wing, and the vertical position of the rudder, the rudder area and rudder lift coefficient to adjust this effect. Some of these parameters will work against each other. Induced roll is a very complex effect to balance which will depend on many factors.
- Roll Damping: Defines how much the roll speed will be dampened based on the current roll speed. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, most of the roll damping will be the result of the wings, the elevator and the rudder resisting roll. You can also use Roll Stability and Roll Gyro Stability to add more roll damping.
- Yaw Rate: Defines how much roll moment will be generated when the aircraft is rotating around the yaw axis. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, most of the roll will be induced by the difference in lift between one wing and the other, and the rudder will work against this effect. Adjust the shape of the wing via Sweep, Dihedral, Twist, Camber, the position of the wing, and the vertical position of the rudder, the rudder area and rudder lift coefficient to adjust this effect. Some of these parameters will work against each others. Induced roll is a very complex effect to balance which will depend on many factors.
- Roll Moment Spoilers: Defines how much roll moment will be generated when the spoilers will be deflected. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, this will be automatically simulated and there is no way yet to change the roll moment generated by spoilers.
- Roll Moment Delta Aileron: Defines how much roll moment will be generated when the ailerons are deflected. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use the Aileron Span Outboard, Aileron Effectiveness and the aileron up and down angles to control this effect.
- Delta Rudder: Defines how much roll moment will be generated when the rudder is deflected. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, most of the roll will be induced by the difference in lift between one wing and the other, and the rudder will work against this effect. Adjust the shape of the wing via Sweep, Dihedral, Twist, Camber, the position of the wing, and the vertical position of the rudder, the rudder area and rudder lift coefficient to adjust this effect. Some of these parameters will work against each other. Induced roll is a very complex effect to balance which will depend on many factors.
- Aileron Trim Scalar: Defines how much roll moment will be generated when the aileron trim is are deflected. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use the Aileron Span Outboard, Aileron Effectiveness and aileron up and down angles to control this effect.
- Yaw Moment Slip Angle: Defines how much yaw moment will be generated when the aircraft is yawing or side slipping. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use Fuselage Lateral CX to modify the side drag coefficient of the fuselage and Rudder Lift Coef to modify the forces generated by the rudder. The longitudinal position of the fuselage and rudder will have a big impact on the yaw moment. If most of the fuselage is behind the CG, the fuselage will have a stabilizing effect.
- Yaw Moment Roll: Defines how much yaw moment will be generated when the aircraft has some roll speed (during a roll). This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, the yaw moment resulting from a roll is a complex combination of the effect of all the aircraft surfaces that cannot be directly controlled. Adjusting the rudder surface parameters will have the largest effect here but the wing will have an effect too. Making sure the aircraft surfaces are correctly aligned and feature correct areas and coefficients will result in a realistic yaw moment when rolling.
- Yaw Damping: Defines how much the yaw speed will be dampened based on the current yaw speed. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, most of the yaw damping will be the result of the rudder and fuselage, but the wings contribute as well. You can also use Yaw Stability and Yaw Gyro Stability to add more yaw damping.
- Yaw Propwash: Defines how much yaw moment will be generated when the plane is yawing and there is a propeller spinning (prop wash). This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model this is automatically simulated based on how air is accelerated by the propeller and blown onto the control surfaces. However one can use the Rudder Lift Coef, rudder longitudinal position and rudder area to adjust this effect. In the modern flight model, this effect only works if the propeller is blowing air onto the control surfaces. If the propeller is under a wing, far from any surface, this effect will automatically not occur.
- Delta Aileron: Defines how much yaw moment will be generated when the ailerons are deflected. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, this will mostly be caused by a difference in drag between both wings because of the difference in airspeed between both wings and the difference in deflection of both ailerons. Use the Aileron Up Drag Coef, Aileron Down Drag Coef and aileron up and down angles to control this effect.
- Delta Rudder: Defines how much yaw moment will be generated when the rudder is deflected. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use Rudder Lift Coef to modify the moment generated by the rudder deflection. The longitudinal position of the rudder also plays an important role.
- Delta Rudder Propwash: Defines how much yaw moment will be generated when the plane rudder is deflected and there is a propeller spinning (prop wash). This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model this is automatically simulated based on how air is accelerated by the propeller and blown onto the control surfaces. However one can use the Rudder Lift Coef, rudder longitudinal position and rudder area to adjust this effect. In the modern flight model, this effect only works if the propeller is blowing air onto the control surfaces. If the propeller is under a wing, far from any surface, this effect will automatically not occur.
- Delta Rudder Trim Scalar: Defines how much yaw moment will be generated when the rudder trim is are deflected. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. In the modern flight model, use the Rudder Trim Effectiveness, rudder area and rudder max deflection to control this.
- Compute Aero Center: When checked, this tells the simulation that the aerodynamic center longitudinal position should be placed computationally, instead of manually. While this is more for legacy aircraft, it can still be used with the modern flight model. However we recommend disabling the computation of the aerodynamic center - leaving this unchecked - and positioning it manually with Aero Center Lift.
- Aero Center Lift: When Compute Aero Center is unchecked this variable allows you to define the longitudinal position of the aerodynamic center, expressed as a Percent Over 100. The modern flight model does not force the position of the aerodynamic center during the simulation because the aerodynamic center is not static in this flight model - it is calculated as the result of complex pressure forces applied on the surfaces, which actually causes a moving aerodynamic center. It is, however, usually very close to 25% and will normally move between 20% and 30%. So, we use this variable to longitudinally align the wing surfaces with the wing geometry, considering that the aerodynamic center is located at 25% MAC. Again, this does not mean that the aero center will then stay at 25% MAC during the simulation, it will just be used to initialize the surface position once at the start of a flight.
IMPORTANT! This is positioned relative to the (0,0,0) position in the 3D model reference, not the Reference Datum Position.
- Aileron Up Drag Coef: This defines the drag added by upwards aileron deflection. This parameter has a significant impact on adverse yaw. Reduce upward deflection drag to get more adverse yaw. This parameter is multiplied by the aileron deflection angle and internal coefficients. This can be scaled with the Aileron Down Drag Scalar parameter and is further modified by internal coefficients.
- Aileron Down Drag Coef: This defines the drag added by upwards aileron deflection. This parameter has a significant impact on adverse yaw. Increase downward deflection drag to get more adverse yaw. This parameter is multiplied by the aileron deflection angle. This can be scaled with the Aileron Down Drag Scalar parameter and is further modified by internal coefficients.
- Elevator Lift Coef: This defines the lift coefficient slope of the elevator control surface. This will have a direct impact on elevator authority and pitch stability. The elevator lift coefficient slope is usually dependent on the elevator aspect ratio. The default value is 5.0, and generally values will always fall between 1.0 and 5.0, with a theoretical maximum of 2𝝅 and a recommended value between 2.0 (for less authority and stability) and 5.0 (for more authority and stability). This can be scaled with the Elevator Effectiveness parameter in the Flight Tuning section.
- Rudder Lift Coef: This defines the lift coefficient slope of the rudder control surface. This will have a direct impact on rudder authority, yaw stability, adverse yaw and induced roll. The rudder lift coefficient slope is usually dependent on the rudder aspect ratio. The default value is 5.0, and generally values will always fall between 1.0 and 5.0, with a theoretical maximum of 2𝝅 and a recommended value between 2.0 (for less authority and stability) and 5.0 (for more authority and stability). This can be scaled with the Rudder Effectiveness parameter in the Flight Tuning section.
- Lift Coef At Drag Zero: When building the surfaces of the aircraft, the modern flight model allows us to use the following drag formula:
\({C_D} = {C_{D0}} + K(C_L - C_{L0})^{2}\)
This parameter represents the \({C_{L0}}\) parameter of this formula in the clean configuration. The aircraft is built trying to match this drag polar and then a normalization pass is done on all surfaces to perfectly match the target polar. This parameter has also been added to the legacy FSX flight model that now also allows \({C_{D0}}\) to not be always zero.
- Lift Coef At Drag Zero Flaps: When building the surfaces of the aircraft, the modern flight model allows us to use the following drag formula:
\({C_D} = {C_{D0}} + K(C_L - C_{L0})^{2}\)
This parameter represents the \({C_{L0}}\) parameter of this formula in the landing configuration with flaps fully deployed. The aircraft is built trying to match this drag polar and then a normalization pass is done on all surfaces to perfectly match the target polar. This parameter has also been added to the legacy FSX flight model that now also allows \({C_{D0}}\) to not be always zero.
- Fuselage Lateral CX:
Defines the perpendicular drag coefficient of the fuselage, which occurs when the airflow is going perpendicular to the front axis (ie: sideways - left to right or right to left) but also going up and down. This coefficient has an impact on drag when side slipping, as well as a general impact on yaw stability and pitch stability. Faster aircraft with a larger reynolds number should usually have a larger lateral fuselage \(C_x\).
Please note that the drag calculation supposes that the fuselage shape seen from the side has the shape of a rectangle with skewed front and rear tips. A larger or smaller \(C_x\) may be necessary to compensate for different fuselage shapes. If the fuselage has edges and is different from a perfect cylinder, the \(C_x\) should be higher. If the fuselage's area, when seen from the side, is smaller than the area of a skewed rectangle, the \(C_x\) should be smaller to compensate. A longer aircraft, with a higher l/d ratio, will have a higher \(C_x\). A shorter aircraft with a smaller l/d ratio, will have a smaller \(C_x\). Therefore, when chosing a \(C_x\) it is important to consider the reynolds number and l/d ratio of the fuselage.
Default is 0.4 - which is approximately the lateral drag of a cylinder with a reynolds number of a small aicraft and a l/d ratio of about 5, compensated for the shape of most small aircraft fuselages. The value should usually fall between 0.2 and 1.2 for most aircraft (with a "soft" limit of 2, which would essentially be a box).
- Lift Coef AoA Table: This table allows you to define the AoA polar (in radians) against the clean aircraft lift coefficient. The AoA vs. lift table defines how much lift the aircraft generates at various AoAs. The table has a maximum of 13 entries where you define the lift coefficient and the corresponding AoA alpha per entry.
In the modern flight model, this is used during the aircraft surfaces construction as a lift target that the aircraft should achieve at various angles of attack. This will impact the wing surfaces only, but the total lift will consider all surfaces. It describes the lift in clean configuration (ie: zero slip, no propeller, no gears, no control surface deflection). Once the aircraft is created, if will be normalized so that the effective lift coefficients measured actually match the target lift coefficients.NOTE: The lift coefficients are only matched between AoAs 0 and the stall AoA. For other AoAs all around the 360° of the polar, it will be a natural consequence of the setup of the aerodynamic surfaces and other parameters. The polar does not need to be accurately defined in detail for AoAs outside of the -10° to stall +10° range in this table.
- Lift Coef Ground Effect Mach Table: This table allows you to scale the ground effect intensity. This defines the maximum ground effect on the lift component but will impact the maximum effect on the induced drag component proportionally as well. Even though this table allows you to define the ground effect at various mach levels, it is the primary way to set the ground effect intensity.
- Lift Coef Mach Table: Scales the lift coefficient based on the mach level. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Lift Coef Delta Elevator Mach Table: Scales the delta elevator lift coefficient based on the mach level. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Lift Coef DAoA Mach Table: Scales the lift coefficient impacted by the change in AoA based on the mach level. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Lift Coef Pitch Rate Mach Table: Scales the lift coefficient impacted by the change in pitch based on the mach level. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Lift Coef Horizontal Incidence Mach Table: Scales the lift coefficient impacted by the change in yaw based on the mach level. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Drag Coef Zero Lift Mach Table: Adds drag based on the mach level. In the modern flight model, the drag coefficient at higher mach levels is automatically impacted by a progressive detaching of the laminar airflow over the surfaces. However this table allows to add more drag at specific mach levels to simulate a mach wall or specific effects of drag due to turbulence at specific drag levels. Drag walls are not natively simulated yet and will need to be defined with this table.
- Side Force Slip Angle Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Side Force Delta Rudder Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Side Force Slip Angle Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Side Force Yaw Rate Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Side Force Roll Rate Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Pitch Moment AoA Table: Influence CoL computation if not prescribed. Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Pitch Moment Delta Elevator AoA Table: AoA(alpha) is given in DEGREES. Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Pitch Moment Horizontal Incidence AoA Table: AoA(alpha) is given in DEGREES. Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Pitch Moment dAoA AoA Table: AoA(alpha) is given in DEGREES. Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Pitch Moment Pitch Alpha AoA Table: AoA(alpha) is given in DEGREES. Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Pitch Moment Delta Elevator Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Pitch Moment daoa Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Pitch Moment pitch Rate Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Pitch Moment Horizontal Incidence Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Pitch Moment AoA0 Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Roll Moment AoA table: \({C_L}\) (roll moment coefficient) versus AoA-Legacy FSX table, not used in the modern This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model. flight model.
- Roll Moment Slip Angle AoA table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Roll Moment Roll Rate AoA Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Roll Moment Delta Aileron AoA table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Roll Moment Slip Angle Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Roll Moment Delta Rudder Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Roll Moment Delta Aileron Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Roll Moment Yaw Rate Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Roll Moment Roll Rate Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Yaw Moment AoA table: \({C_n}\) (yaw moment coef) versus AoA. Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Yaw Moment Slip Angle AoA table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Yaw Moment Yaw Rate AoA Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Yaw Moment Delta Rudder AoA table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Yaw Moment Slip Angle Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Yaw Moment Delta Rudder Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Yaw Moment Delta Aileron Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Yaw Moment Yaw Rate Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Yaw Moment Roll Rate Mach Table: Legacy FSX table, not used in the modern flight model. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Elevator Scaling Table: Allows you to define a non linear elevator deflection curve on top of the input curve settings possible in the simulator. The table defines how the input value is scaled for each range of input values. Default is to scale all input values by 1, and that the angles should be expressed in radians.
- Aileron Scaling Table: Allows to define a non linear aileron deflection curve on top of the input curve settings possible in the simulator. The table defines how the input value is scaled for each range of input values. Default is to scale all input values by 1, and that the angles should be expressed in radians.
- Rudder Scaling Table: Allows to define a non linear rudder deflection curve on top of the input curve settings possible in the simulator. The table defines how the input value is scaled for each range of input values. Default is to scale all input values by 1, and that the angles should be expressed in radians.
- Aileron Load Factor Effectiveness Table: Scaling of Roll Moment Delta Aileron versus gravity forces. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
Flight Tuning

NOTE: This section is not required when you have selected "Helicopter" as the aircraft Category.
This section is for tuning various aspects of the flight model for an aircraft. The available parameters are:
- Modern FM Only: When checked this will force the aircraft to use the modern flight model, regardless of what the user may have selected in the Microsoft Flight Simulator options.
- Legacy FM Only: When checked this will force the aircraft to use the legacy flight model, regardless of what the user may have selected in the Microsoft Flight Simulator options.
- Legacy FM New Integration: This is only applicable to those aircraft that are using the legacy Flight Model. It was discovered that there was an issue with the acceleration integration calculations for the legacy flight model, and so this parameter exists to fix that. When checked the calculations will be correct, which may affect the handling of aircraft that have been calibrated using the "broken" flight model. When unchecked, the flight model will be the original one without the fix.
- Empty CG Deviation Limit: This value allows you to define - in ft - a limit to the maximum deviation that will be allowed in the weight and balance UI menu (where users can change the empty CG position).
- Icing Scalar: With this value you can scale up or down the effects of icing on the plane. This will affect the effect of icing on lift and on the weight. Can accept 0.0 to remove all effects of icing, and the input is expressed as a Percent Over 100
- Cruise Lift Scalar: Scales the target lift coefficient as looked up from Lift Coef AoA Table over the entire range of AoAs.
- Parasite Drag Scalar: Scales the target drag coefficient as defined in Drag Coef Zero Lift.
- Induced Drag Scalar: Scales the induced drag target as defined by the target induced drag formula:
\({C}_{Di} = \frac {{C_l} ^{2}} {pi \times AR \times e}\) Cl * Cl / pi * AR * e
This scalar applies to the FLAP 0 configuration (in clean configuration, ie: no propeller, no turbulence, no engine wash, no gears, no flaps, no spoilers, no deflections...).
- Flap Induced Drag Scalar: Scales the induced drag target as defined by the target induced drag formula:
\({Cd}_{i} = \frac {Cl ^{2}} {pi \times AR \times e}\) Cl * Cl / pi * AR * e
This scalar applies to the FULL FLAP configuration (ldg).
- ClCd Normalization AoA Deg Low: Lower AoA at which the aircraft's lift and drag is normalised to the theory curve.
- ClCd Normalization AoA Deg High: Higher AoA at which the aircraft's lift and drag is normalized to the theory curve.
-
Elevator Effectiveness: This scalar scales the Elevator Lift Coef parameter in the Aerodynamics section.
-
Elevator Max Angle Scalar: Scales the deflection angle of the elevator control surface up to the max deflection indicated in the Elevator Trim Limit, Elevator Trim Up Limit, and Elevator Trim Down Limit parameters, and already scaled by the Elevator Elasticity Table. The default value is 1.0, yet if the limit angles are matching the real aircraft, this scalar should be smaller than one as the effective deflection will be aligned with the overall horizontal tail and elevator chord. A value between 0.5 and 0.75 will work with most airplanes.
-
Elevator Chord Angle Scalar: Used to re-scale the elevator effectiveness using the following formula:
ratio = elevator_chordangle_scalar * elevator_area / (elevator_area + htail_area)
The ratio is then applied to the the
Clde,Cmde,CmdTrimandCmdePropwash.
-
Htail Max Angle Scalar: This scalar is used in the calculations that define the orientation of the elevator aerodynamic surfaces.
-
Rudder Chord Angle Scalar: Used to re-scale the rudder effectiveness using the following formula:
ratio = elevator_chordangle_scalar * elevator_area / (elevator_area + htail_area)
The ratio is then applied to theCydr,Cldr,CndrandCndrPropwash.
-
Vtail Max Angle Scalar: This scalar is used in the calculations that define the orientation of the rudder aerodynamic surfaces.
-
Aileron Effectiveness: Scales the elevator lift coefficient slope as defined by the Elevator Lift Coef in the Aerodynamics section. This basically increases or decreases elevator authority or "twitchyness" without affecting the deflection angle.
-
Rudder Effectiveness: This scalar scales the Rudder Lift Coef parameter in the Aerodynamics section. Values will increase or decrease lift authority or "twitchyness" without affecting the deflection angle.
-
Rudder Max Angle Scalar: Scales the deflection angle of the rudder control surface up to the max deflection indicated in Rudder Limit and already scaled by the Rudder Elasticity Table. The default value is 1, and if the limit angles are matching the real aircraft, this scalar should be less than 1 as the effective deflection will be aligned with the overall vtail and rudder chord. A value between 0.5 and 0.75 will work with most airplanes.
- Pitch Stability: Sets a target value for aerodynamic resistance to pitch rotation for the plane. In the legacy flight model, this will scale the Pitch Damping variable. In the modern flight model, this will set a target aerodynamic resistance value that the flight model will try to reach by adding more rotation resistance to each surface. As this system can only add more resistance, there will be a minimum native aerodynamic resistance below which the system can't go. By setting a low target, such as 0.1, the target is usually below the native aerodynamic rotation resistance which means that this parameter will have no effect. To add more aerodynamic resistance, use larger values.
NOTE: Aerodynamic resistance to rotation is relative to the local air mass. If the local airmass is turbulent, increasing rotation resistance will make turbulence impact more on the aircraft.
-
Roll Stability: Sets a target value for aerodynamic resistance to roll rotation for the plane. In the legacy flight model, this will scale the Roll Damping variable. In the modern flight model, this will set a target aerodynamic resistance value that the modern flight model will try to reach by adding more rotation resistance to each surface. As this system can only add more resistance, there will be a minimum native aerodynamic resistance below which the system can't go. By setting a low target, such as 0.1, the target is usually below the native aerodynamic rotation resistance which means that this parameter will have no effect. To add more aerodynamic resistance, use larger values.
NOTE: Aerodynamic resistance to rotation is relative to the local air mass. If the local airmass is turbulent, increasing rotation resistance will make turbulence impact more on the aircraft.
-
Yaw Stability: Sets a target value for aerodynamic resistance to yaw rotation for the plane. In the legacy flight model, this will scale the Yaw Damping variable. In the modern flight model, this will set a target aerodynamic resistance value that the modern flight model will try to reach by adding more rotation resistance to each surface. As this system can only add more resistance, there will be a minimum native aerodynamic resistance below which the system can't go. By setting a low target, such as 0.1, the target is usually below the native aerodynamic rotation resistance which means that this parameter will have no effect. To add more aerodynamic resistance, use larger values.
NOTE: Aerodynamic resistance to rotation is relative to the local air mass. If the local airmass is turbulent, increasing rotation resistance will make turbulence more impacting on the aircraft.
- Pitch Gyro Stability: This variable controls pitch gyroscopic stability. Unlike aerodynamic stability - which is relative to the local airmass - gyroscopic stability is world relative and will not make the aircraft more sensitive to turbulence. It will have the opposite effect in reality: making the aircraft more stable relative to the world, it will become less sensitive to turbulent air. Gyroscopic stability in an aircraft is caused by turning parts such as the propellers or engine axis or turbines.
-
Roll Gyro Stability: This variable controls roll gyroscopic stability. Unlike aerodynamic stability - which is relative to the local airmass - gyroscopic stability is world relative and will not make the aircraft more sensitive to turbulence. It will have the opposite effect in reality: making the aircraft more stable relative to the world, it will become less sensitive to turbulent air. Gyroscopic stability in an aircraft is caused by turning parts such as the propellers or engine axis or turbines.
-
Yaw Gyro Stability: This variable controls yaw gyroscopic stability. Unlike aerodynamic stability - which is relative to the local airmass - gyroscopic stability is world relative and will not make the aircraft more sensitive to turbulence. It will have the opposite effect in reality: making the aircraft more stable relative to the world, it will become less sensitive to turbulent air. Gyroscopic stability in an aircraft is caused by turning parts such as the propellers or engine axis or turbines.
-
Elevator Trim Effectiveness: Scales the elevator trim deflection angle and maximum trim deflection angle as defined in Elevator Trim Limit.
-
Aileron Trim Effectiveness: Scales the aileron trim deflection angle and maximum trim deflection angle.
-
Rudder Trim Effectiveness: Scales the rudder trim deflection angle and maximum trim deflection angle as defined in Rudder Trim Limit.
-
Aileron Up Drag Scalar: Scales the drag added by upwards aileron deflection as defined in aileron_up_drag_coef parameter in the [AERODYNAMICS] section. This parameter has a significant impact on adverse yaw. Reduce upward deflection drag to get more adverse yaw.
-
Aileron Down Drag Scalar: Scales the drag added by downwards aileron deflection as defined in aileron_down_drag_coef parameter in the [AERODYNAMICS] section. This parameter has a significant impact on adverse yaw. Increase downward deflection drag to get more adverse yaw.
- Hi Alpha On Roll: Multiplier on the effects on roll at high angles of attack. This parameter is only used in the legacy FSX flight model to define the stall characteristics of the aircraft. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- Hi Alpha On Yaw: Multiplier on the effects on yaw at high angles of attack. This parameter is only used in the legacy FSX flight model to define the stall characteristics of the aircraft. This parameter will only be visible when the Use Legacy option has been checked and is not required for the modern flight model.
- P Factor On Yaw: Scales the amount of p-factor induced yaw. P-factor is the result of the propeller providing asymmetric thrust when the propeller is not aligned with the trajectory.
- Torque On Roll: Scales the amount of torque that is transmitted from the engine onto the aircraft. When the engine starts to roll into one direction, it will cause the aircraft to roll into the other direction.
- Gyro Precession On Pitch: Scales the amount of gyroscopic precession the engine causes on the aircraft's pitch.
- Gyro Precession On Yaw: Scales the amount of gyroscopic precession the engine causes on the aircraft's yaw.
- Engine Wash On Roll: Scales the impact that the engine wash will have on the control surfaces of the aircraft that causes the aircraft to roll.
- Wing Engine Wash: Scales the amount of propeller wash that will affect the lift of the part of the wing right behind the propeller.
- Rudder Wash On Roll: Scales the amount of added rudder trim compensating engine wash impact on roll. This parameter is separated from the actual rudder trim because it will be disabled with the engine wash on roll depending on piloting assistance's.
- Wingflex Scalar: Wingflex is based on realistic lift force and gravity computations and default elasticity parameters for a standard wing. This scalar allows to scale the amount of wingflex written to the
WING_FLEX_PCTSimVar.
- Wingflex Surface Scalar: This scalar can be used to modify how the actual aerodynamic surfaces are being flexed by the winglfex force. Set to 1, it should approximately do the correct wingflex, but it will depend on the aircraft wing stiffness.
- Wingflex Offset: Wingflex is based on realistic lift force and gravity computations and default elasticity parameters for a standard wing. This offset allows to offset the amount of wingflex written to the
WING_FLEX_PCTSimVar.
- Ground Crosswind Effect Zero Speed: This parameter represents the world speed (in FPS) at which 0% of the crosswind effect is applied to the aircraft. At this speed and below, the lateral (x) component of the wind is set to zero.
- Ground Crosswind Effect Max Speed: This parameter represents the world speed (in FPS) at which 100% of the crosswind effect is applied to the aircraft.
- Ground High Speed Steeringwheel Static Friction Scalar: At high speeds, tires are rolling and - depending on their shape and width and how much they are inflated - they will more or less resist rotation or sideways motion. This parameter allows you to define how much a moveable wheel resists static friction which goes sideways or resists rotation around the vertical axis. Essentially, it allows you to control how much the aircraft will move into the crosswind when rolling at higher speeds, and reducing the scalar will reduce the friction, so the aircraft is more likely to slide. Note that only the lateral forces are impacted by this value, so rolling friction and braking when your aircraft is rolling straight will not be influenced.
- Ground High Speed Otherwheel Static Friction Scalar: At high speeds, tires are rolling and - depending on their shape and width and how much they are inflated - they will more or less resist rotation or sideways motion. This parameter allows you to define how much a non-moveable wheel resists static friction which goes sideways. Essentially, it allows you to control how much the aircraft will move into the crosswind when rolling at higher speeds, and reducing the scalar will reduce the friction, so the aircraft is more likely to slide. Note that only the lateral forces are impacted by this value, so rolling friction and braking when your aircraft is rolling straight will not be influenced.
- Stall Coef at Min Height:This coefficient is used as part of the calculations involved with defining the predicted stall speed that will be used to guide the auto-pilot and FBW systems. The actual calculation is as follows:
stallSpeed = flapStallSpeed * (stall_coef_at_min_weight + (1 - stall_coef_at_min_weight) * weightPercent)
- Stall Pitch Scalar: This parameter cuts off some of the stalling ability in the modern flight model. In general we don't recommend editing this to anything other than the default value, except for delta wings that can fly at extreme AoAs.
- Predicted MOI Density Fuselage: In the Weight debug window, this parameter will impact the predicted MOI that is displayed and can be used to help configure the MOI.
IMPORTANT! This parameter is provided for debug information only and editing it will not affect the flight model.
- Predicted MOI Density Wings: In the Weight debug window, this parameter will impact the predicted MOI that is displayed and can be used to help configure the MOI.
IMPORTANT! This parameter is provided for debug information only and editing it will not affect the flight model.
- Disable Assistances: When checked this will disable all available assistances for the aircraft.
- Prop Moment Transfer On Roll: This parameter allows you to scale how much of the propeller acceleration moment is transferred back to the aircraft body. Note that this does not apply to the absorbed torque, only to the RPM acceleration moment.
Helicopter

If you are modelling a helicopter then this section is essential, and is used - along with the Fuesalge Aerodynamics and Main Rotor / Secondary Rotor sections - to define the flight model, and including these sections usually means there is no need to include data for the Airplane Geometry, Aerodynamics, and Flight Tuning sections.
The available parameters are:
- Low Realism Stability Scale: This table of three values can be used to scale the pitch, roll and yaw stability of the helicopter. This is a legacy parameter, and should only be used when Use Modern Surfaces is unchecked).
- Enable Custom Throttle Controls: When this is checked you may control the engine throttles directly using the appropriate SimVars, therefor bypassing (essentially disabling) the default internal simulation functionality.
- Reference Length: The overall length of the helicopter fuselage (excluding rotors), in ft.
- Reference Frontal Area: The front facing area of the helicopter fuselage (excluding rotors), in sqft.
- Reference Side Area: The lateral facing area of the helicopter fuselage (excluding rotors), in sqft.
- Side Aero Center: The longitudinal position, in ft, from the Reference Datum Position of the helicopter that represents the lateral aerodynamic center.
NOTE: This is a legacy FSX parameter not used in the modern flight model.
- Lift Aero Center: The longitudinal position, in ft, from the Reference Datum Position of the helicopter that represents the vertical aerodynamic center.
NOTE: This is a legacy FSX parameter not used in the modern flight model.
- Right Trim Scalar: This value scales the lateral cyclic trim position.
- Front Trim Scalar: This value scales the longitudinal cyclic trim position.
- Right Trim Step: The right trim increment value.
- Front Trim Step: The front trim increment value.
- Pedal Control Scalar: This parameter scales the pedal controls. This is a legacy parameter, and should only be used when Use Modern Surfaces is unchecked.
- Pedal Yaw Control Scalar: This parameter scales the pedal controls. This should only be used when Use Modern Surfaces is checked.
-
Collective To Throttle Correlator: Defines the ratio - from 0 to 1 - with which the collective lever control position is added to the twist grip throttle control position. This will then be applied to the engine(s). The actual equation looks like this:
throttle = throttle_control + collective_control * collective_to_throttle_correlator
Note that if the parameter is set to 0 then the engine throttle will work as a simple throttle twist grip control.
IMPORTANT: If you use this parameter, then you cannot use Collective To Throttle Correlator Table 1D nor Collective To Throttle Correlator Table 2D.
-
Collective To Throttle Correlator Table 1D: This defines the relationship between the collective control position and the twist grip throttle. In this case the throttle applied to the engine(s) is calculated as the sum of the twist grip throttle control position and the result of linear interpolation from this table, depending on the collective control position:
throttle = throttle_control + f (collective_control)
Note that if the parameter has all values set to 0 then the engine throttle will work as a simple throttle twist grip control.
IMPORTANT: If you use this parameter, then you cannot use Collective To Throttle Correlator nor Collective To Throttle Correlator Table 2D.
-
Collective To Throttle Correlator Table 2D: This is a 2D table where
- The top row corresponds to the twist grip throttle control position, from 0 to 1
- The left column corresponds to the collective control position, from 0 to 1
- All other values correspond to the ratio between these two controls, also from 0 to 1
Together they define the throttle control for all helicopter engines using a 2D linear interpolation of the given values. This can be used to help maintain nominal rotor RPM when the pilot moves the collective lever. Note that if all values in this table are set to 0, then the engine throttle works as a simple throttle (twist grip control).
IMPORTANT: If you use this parameter, then you cannot use Collective To Throttle Correlator nor Collective To Throttle Correlator Table 1D.
-
Collective Move Rate Limit: This sets the limit on the maximum speed of movement by the collective. The value given here is a ratio between 0 and 1, where the limit is calculated as ratio/sec. If set to 0, then there is no limit imposed.
- Governed Pct RPM Ref: This is the ratio of the rated RPM that the rotor RPM governor will try to achieve, expressed as a Percent Over 100.
- Governed Pct RPM Min: This is the ratio of the rated RPM above which the governor will be enabled, expressed as a Percent Over 100. Note that this value cannot be less than zero and negative values will be clamped to 0.
- Governor Speed Limit: This sets the limit on the maximum speed of throttle movement by the governor. The value given here is a ratio between 0 and 1, where the limit is calculated as ratio/sec. If set to 0, then there is no limit imposed.
- Rotor Brake Scalar: With this parameter you can scale the rotor braking torque.
- Rotor Friction Torque: This value adjusts the speed at which the rotors will slow down after shutting off the engine. The value is in ftlbs per ft.
- Torque Scalar: With this parameter you can scale the rotor torque effect.
NOTE: This parameter will only be used when the Use Modern Surfaces parameter is unchecked.
- Tail Rotor Translating Scalar: This parameter scales the tail rotor thrust.NOTE: This parameter will only be used when the Use Modern Surfaces parameter is unchecked.
- Disk Roll Animation Scalar: This parameter scales the rotor disk roll animation angle.
- Disk Pitch Animation Scalar: This parameter scales the rotor disk pitch animation angle.
- Cyclic Roll Control Scalar: This parameter scales the roll cyclic controls.
- Cyclic Pitch Control Scalar: This parameter scales the pitch cyclic controls.
- Cycllic Y On Cyclic Y: This parameter allows you to reduce how much the cyclic input adjusts the pitch of the rotor blades. By reducing Cycllic Y On Cyclic Y and increasing Cyclic Y On Collective, one can get a duel rotor helicopter (like the Chinook) to pitch forward and backward using a difference in lift between the front and rear rotor.
NOTE: This parameter is only used when your helicopter has the Tail Rotor parameter set to 0 (FALSE) for both the Main and Secondary rotor, ie: it is a dual rotor helicopter.
- Cyclic Y On Collective: This parameter allows you to increase how much the cyclic input will adjust the collective setting of the rotor blades. By reducing Cycllic Y On Cyclic Y and increasing Cyclic Y On Collective, one can get a duel rotor helicopter (like the Chinook) to pitch forward and backward using a difference in lift between the front and rear rotor.
NOTE: This parameter is only used when your helicopter has the Tail Rotor parameter set to 0 (FALSE) for both the Main and Secondary rotor, ie: it is a dual rotor helicopter.
- Pedal Control Scalar: This parameter scales the pedal controls.
- Pedal On Bank: When set to a value greater than 0, this parameter will allow the pilot to control the bank of the rotor, with the pedals in order to make the helicopter yaw.
NOTE: This parameter is only used when your helicopter has the Tail Rotor parameter set to 0 (FALSE) for both the Main and Secondary rotor, ie: it is a dual rotor helicopter.
- Pedal On Cyclic X: When set to a value greater than 0, this parameter will allow the pilot to control the pitch of the rotor, with the pedals in order to make the helicopter yaw (For helicopters that have 2 main rotors that are one over the other, creating more drag on one rotor while reducing drag on the rotor spinning in the opposite direction, will yaw the helicopter).
NOTE: This parameter is only used when your helicopter has the Tail Rotor parameter set to 0 (FALSE) for both the Main and Secondary rotor, ie: it is a dual rotor helicopter.
- Pedal On Collective: When set to a value greater than 0, this parameter will allow the pilot to yaw the helicopter using rotor drag.
NOTE: This parameter is only used when your helicopter has the Tail Rotor parameter set to 0 (FALSE) for both the Main and Secondary rotor, ie: it is a dual rotor helicopter.
- Collective On Rotor Torque Scalar: This parameter scales the collective impact on rotor torque.
NOTE: This parameter will only be used when the Use Modern Surfaces parameter is unchecked
- Stabilizer Cyclic Scale: If a stabilizer is present and enabled, this is the ratio of assistance it will provide the cyclic.
- Stabilizer Rudder Scale: If a stabilizer is present and enabled, this is the ratio of assistance it will provide the rudder.
- Engine Internal MOI: This is the internal moment of inertia of the moving parts of one engine for the clutch simulation and the unclutched simulation, in lbs per ft².
- Clutch Maximum Torque Up: This is the clutch simulation maximum clutch torque when the engine RPM is pulled up, in lbs per ft.
- Clutch Maximum Torque Down: This is the clutch simulation maximum clutch torque when the engine RPM is pulled up, in lbs per ft.
- Clutch Unclutch Time: The time - in seconds - it takes for the clutch to go from 0% to 100% or from 100% to 0%.
- Engine Trim Min: Sets the minimum ratio of the engine rated RPM that can be set by the trimmer. Value is between 0 and 1. Note that this value will be used by the
DECREASE_HELO_GOV_BEEPandINCREASE_HELO_GOV_BEEPkey events. As an example: if your rated rotor RPM is 1000RPM, setting the min to 0.9 and the max to 1.1 will allow you to set the trimmer to a value between 900RPM and 1100RPM.
- Engine Trim Max: Sets the maximum ratio of the engine rated RPM that can be set by the trimmer. Value must be greater than 1 (up to "infinity"). Note that this value will be used by the
DECREASE_HELO_GOV_BEEPandINCREASE_HELO_GOV_BEEPkey events. As an example: if your rated rotor RPM is 1000RPM, setting the min to 0.9 and the max to 1.1 will allow you to set the trimmer to a value between 900RPM and 1100RPM.
- Engine Trim Rate: Sets the speed of change of the ratio of the engine rated RPM, calculated as
RPM Ratio / sec. Note that this value will be used by theDECREASE_HELO_GOV_BEEPandINCREASE_HELO_GOV_BEEPkey events.
- Assistance Cyclic Pitch Stability Center: This is used to center the assistance neutral input for the pitch cyclic, in degrees.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Cyclic Bank Stability Center: This is used to center the assistance neutral input for the bank cyclic, in degrees.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Pedal Yaw Stability Center: This ratio is used to center the assistance neutral input for the pedal.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Pedal Yaw Rotation: This is the ratio of the yaw rotation velocity countering the proportional force.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Pedal Yaw Maxinput: This is the maximum input ratio for all assistance rudder input.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Pedal Yaw Integralmax: This is the maximum input ratio for the integral part of the assistance rudder input.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Pedal Yaw Integralspeed: This is the ratio of the yaw rotational velocity countering the integral force.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Cyclic D. Rotation: This is the ratio of the pitch and bank rotational velocity countering the proportional force.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Cyclic Pitch Rotation: This is the ratio of the pitch and pitch angle countering the proportional force.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Cyclic Bank Rotation: This is the ratio of the pitch and bank angle countering the proportional force.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Cyclic Forwardspeed: This is the ratio of the forward speed countering the proportional force.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Cyclic Sidespeed: This is the ratio of the side speed countering the proportional force.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Cyclic Integralmax: This parameter defines the maximum stabilization bank or pitch angle integral - in degrees - for horizontal motion, countering the bank angle integral.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Cyclic Integralspeed: This is the ratio of the horizontal speed for horizontal motion countering the bank angle integral.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Cyclic Maxinput: This is the maximum input ratio for all assistance cyclic input.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Cyclic Maxspeed: This is the maximum speed - in ft per second - for the cyclic assistance. At a speed of 0 feet per second, the assistance works at 100%. At the specified maxspeed, or above, the assistance is disabled, and in between it gradually decreases.
NOTE: See the Note On Flight Assistance for additional information.
- Assistance Pedal Maxspeed: This is the maximum speed - in ft per second - for the pedal assistance. At a speed of 0 ft per second, the assistance works at 100%. At the specified maxspeed, or above, the assistance is disabled, and in between it gradually decreases.
NOTE: See the Note On Flight Assistance for additional information.
- Governor PID: The PID to control the auto throttle governor. This is split into five values, the Proportional, Integral, and Derivative values as well as the Integral Boundary and the Derivitive boundary. See the PID Primer section for more information on PIDs.
Fuesalge Aerodynamics
This section is for setting up the aerodynamics of a helicopter fuselage.
The available parameters are:
- Use Modern Surfaces: When this is set to 0, it will tell the simulation to use the "legacy" helicopter flight model. However setting this to 1 will select the modern flight model, based on surfaces and CFD calculations.
- Drag Force CF: This is the drag coefficient of the front facing fuselage.
- Side Drag Force CF: This is the drag coefficient of the side facing fuselage.
- Pitch Damp CF: The pitch damping coefficient.
NOTE: This parameter will only be used when the Use Modern Surfaces parameter is unchecked.
- Pitch Stability CF: The pitch stability coefficient.
NOTE: This parameter will only be used when the Use Modern Surfaces parameter is unchecked.
- Roll Damp CF: The roll damping coefficient.
NOTE: This parameter will only be used when the Use Modern Surfaces parameter is unchecked.
- Yaw Damp CF: The yaw damping coefficient.
NOTE: This parameter will only be used when the Use Modern Surfaces parameter is unchecked.
- Yaw Stability CF: The yaw stability coefficient.
NOTE: This parameter will only be used when the Use Modern Surfaces parameter is unchecked.
- Hstab Pos Lon: This sets the relative longitudinal position of the horizontal stabiliser, in ft, relative to the Reference Datum Position.
- Hstab Pos Vert: This sets the relative vertical position of the horizontal stabilizer, in ft, relative to the Reference Datum Position.
- Hstab Span: This sets the span of the horizontal stabiliser, in ft.
- Hstab Area: The area of the horizontal stabiliser, in sqft.
- Hstab Incidence: The angle of incidence of the horizontal stabiliser, in degrees.
- Hstab Lift Coef: This is the coefficient of the slope of lift over the AoA for the horizontal stabiliser.
- Vstab Pos Lon: This sets the longitudinal position of the vertical stabiliser, in ft, relative to the Reference Datum Position.
- Vstab Pos Vert: This sets the relative vertical position of the vertical stabiliser, in ft, relative to the Reference Datum Position.
- Vstab Span: This sets the span of the vertical stabaliser, in ft.
- Vstab Area: The area of the vertical stabiliser, in sqft.
- Vstab Incidence: The angle of incidence of the vertical stabiliser, in degrees.
- Vstab Lift Coef: This is the coefficient of the slope of lift over the AoA for the vertical stabiliser.
- Fuselage Rear Diam Scale: This is the scale of the rear end of the fuselage in relation to the main section.
- Fuselage Rear Pos Vert: The vertical position of the rear end of the fuselage in relation to the main section.
- Fuselage Position: The position of the fuselage centre - in ft - relative to the Reference Datum Position. This can be set by filling in the Z, X and Y position fields, or you can enable the Show Gizmo option to show the position gizmo in the simulation, then click and drag that around to position the point visually.
Main Rotor / Secondary Rotor
These sections are for setting up the main rotor and the secondary rotor of a helicopter. Both sections have the same parameters, which are listed below:
- Tail Rotor: Sets whether the rotor is a main rotor or a tail rotor. When unchecked, it's a horizontal lifting rotor, and when checked this defines a secondary vertical stabilization rotor.
- Position: The position of the rotor center - in ft - relative to the Reference Datum Position. You can enable the Show Gizmo option to show the position gizmo in the simulation, then click and drag that around to position the point visually.
- Max Disc Angle: This parameter will work in two different ways depending on the Use Modern Surfaces setting:
- Unchecked (legacy): this is the maximum angle of the disk when cyclic inputs are at 100%
- Checked (modern): This is the blade beta when cyclic inputs are at 100%
- Radius: The radius of the rotor, in ft.
- Rated RPM: The rated rotation speed of the rotor, in RPM.
- Number Of Blades: The number of blades of the rotor.
- Weight Per Blade: This is the weight of a single blade of the rotor, in lbs.
- Weight To MOI Factor: This defines the weight to MOI ratio for a single blade depending on the mass distribution of the blade.
- Inflow Vel Reference: This defines the reference speed of airflow through the rotor, in ft per second.
NOTE: This parameter will only be used when the Use Modern Surfaces parameter is unchecked.
- Blade Ang Offset: This parameter permits you to align the simulated rotor to the model's visual mesh rotor.
- Blade Aspect Ratio: This is the aspect ratio of the rotor blade length over width. This is used to determine the width of the rotor within the simulation.
- Blade AoA 0 Lift Slope: This is the slope of the lift coefficient over the AoA for each blade.
- Blade AoA Stall Lift Slope: This is the slope of the lift coefficient over the AoA for each blade when the blade is stalled.
- Blade Tip To Root Linear Twist: This parameter sets the blade twist between tip and root, in degrees.
- Blade AoA Stall Scaler: This value inversely scales the AoA angle at which the blade will stall, in degrees.
- Blade AoA Stall Power: This value inversely exponentiates the AoA angle at which the blade will stall.
- Blade AoA 0 Induced Drag Efficiency: This value defines the lift induced drag coefficient.
- Blade AoA 0 Parasitic Drag: This value defines the blade parasitic drag coefficient.
- Blade Thickness Ratio: This defines the rotor blade width over thickness aspect ratio, and permits the simualtion to determine the blade thickness.
- Blade Beta Input Max: This value sets the rotor beta at maximum collective input.
- Blade Beta Input Min: This value sets the rotor beta at minimum collective input.
- Blade Flap Rigidity: This value defines the blade rigidity coefficient for flapping dynamics, and will be used to generate phase lag.
- Blade Flap Inertia: This value defines the blade inertia coefficient for flapping dynamics, and will be used to generate phase lag.
- Blade Low AoA Drag Add Angle: This value defines the angle of AoA below which there will be an increase of drag.
- Blade Low AoA Drag Add Force: This value defines the intensity of the increase of drag at low AoA angles.
- Blade Hi AoA Drag Add Angle: This value defines the angle of AoA above which there will be an increase of drag.
- Blade Hi AoA Drag Add Force: This value defines the intensity of the increase of drag at high AoA angles.
- Blade Tip Lift Scale: This value defines the ratio of the remaining lift at blade tips because of lift lost for induced drag.
- Coning Ratio Load Factor One: This value sets the rotor coning ratio when the load factor is one (a load factor of one represents conditions in straight and level flight, where the lift is equal to the weight).
- Coning Ratio Load Factor Two: This value sets the rotor coning ratio when the load factor is two (a load factor of two approximates the load factor during a maneuver like a turn with a 60º bank angle).
- Coning Angle At Ratio One: This value defines the rotor coning angle when the coning factor is 1 (in degrees).
- Input To Disk Angle Scale: scale of the input on the disc angle to allow for dead zones and trim countering.
- Gyro Precession Scalar: This value permits you to scale the gyroscopic precession of the rotor.
- Reverse Rotation: A value of 0 (FALSE) here will maintain the default rotational direction of the helicopter blades, which is clockwise (when viewed from above). Setting this to 1 (TRUE) will reverse that rotation, so anti-clockwise.
- Static Pitch Angle: This parameter defines the neutral cyclic input pitch angle, in degrees.
NOTE: This is only valid for "top" rotors, ie: rotors where the Tail Rotor parameter is set to 0 (FALSE).
- Static Bank Angle: This parameter defines the neutral cyclic input bank angle, in degrees.
NOTE: This is only valid for "top" rotors, ie: rotors where the Tail Rotor parameter is set to 0 (FALSE).
- Cyclic Pitch Centre: This parameter describes the rotor axis default deflection, according to the helicopter design. This affects not only the tendency of the helicopter to pitch or roll when hands are free, but also the angular position of its body under the rotor in the flight.
- Cyclic Bank Centre: This parameter describes the neutral point the of cyclic control (like a default "trimmer"), which basically only affects the tendency of a helicopter to pitch or roll when hands are free.
- Cyclic Y On Cyclic Y: This parameter allows you to reduce how much the cyclic input adjusts the pitch of the rotor blades. By reducing Cyclic Y On Cyclic Y and increasing Cyclic Y On Collective, one can get a duel rotor helicopter (like the Chinook) to pitch forward and backward using a difference in lift between the front and rear rotor.
NOTE: This parameter is only used when your helicopter has the
Tail Rotorparameter set to 0 (FALSE).
- Cyclic Y On Collective: This parameter allows you to increase how much the cyclic input will adjust the collective setting of the rotor blades. By reducing Cyclic Y On Cyclic Y and increasing Cyclic Y On Collective, one can get a duel rotor helicopter (like the Chinook) to pitch forward and backward using a difference in lift between the front and rear rotor.
NOTE: This parameter is only used when your helicopter has the
Tail Rotorparameter set to 0 (FALSE).
- Pedal On Bank: When set to a value greater than 0, this parameter will allow the pilot to control the bank of the rotor, with the pedals in order to make the helicopter yaw.
NOTE: This parameter is only used when your helicopter has the
Tail Rotorparameter set to 0 (FALSE).
- Pedal On Cyclic X: When set to a value greater than 0, this parameter will allow the pilot to control the pitch of the rotor, with the pedals in order to make the helicopter yaw (For helicopters that have 2 main rotors that are one over the other, creating more drag on one rotor while reducing drag on the rotor spinning in the opposite direction, will yaw the helicopter).
NOTE: This parameter is only used when your helicopter has the Tail Rotor parameter set to 0 (FALSE).
- Pedal On Collective: When set to a value greater than 0, this parameter will allow the pilot to yaw the helicopter using rotor drag.
NOTE: This parameter is only used when your helicopter has the Tail Rotor parameter set to 0 (FALSE).
Reference Speeds

This section contains various reference speed values used in different systems across the sim like the Flight Assistant, the Aircraft Selection UI, notifications, or overspeed triggers. Most of these parameters will have no direct effect on the flight model.
- Full Flaps Stall Speed: Speed at which the aircraft will stall when flaps are at full, in kias.
- Flaps Up Stall Speed: Speed at which the aircraft will stall when flaps are up, in kias.
- Cruise Speed: The aircraft cruise speed, in ktas.
- Cruise Mach: The aircraft cruise speed, in Mach.
- Crossover Speed: The aircraft crossover speed, in kias.
- Max Mach: The maximum speed for the aircraft, in Mach.
NOTE: This parameter will only be visible if the Engine Type is set to Jet or Turboprop.
- Max Indicated Speed: The maximum speed indicated in the aircraft UI, in kias.
- Max Flaps Extended: The maximum aircraft speed with flaps extended, in kias.
- Normal Operating Speed: The normal operating speed of the aircraft, in kias.
- Airspeed Indicator Max: The maximum airspeed indicator value in the UI, in kias.
- Rotation Speed Min: The minimum rotation speed required, in Knots.
- Climb Speed: The aircraft climb speed, in Knots.
- Cruise Altitude: The aircraft cruise altitude, in ft.
- Takeoff Speed: The aircraft takeoff speed, in Knots.
- Spawn Altitude: The spawn altitude, in ft.
- Spawn Cruise Altitude: The spawn cruise altitude, in ft.
- Spawn Descent Altitude: The spawn descent altitude, in ft.
- Best Angle Climb Speed: The best angle climb speed, in Knots.
- Approach Speed: The required approach speed, in Knots.
- Best Glide: The best glide speed, in Knots.
- Max Gear Extended: The maximum speed with landing gear extended, in Knots.
- Best Single Engine Rate Of Climb Speed: This is the best single-engine rate of climb speed (the Blue line speed, \(V_{yse}\) ), in Knots.
- Minimum Control Speed: This is the speed below which aircraft control cannot be maintained if the critical engine fails under a specific set of circumstances (generally known as the \(V_{mc}\) ). Value is in Knots.
- Flight Assistant Use Dynamic Speeds: This parameter refers to how the UI will display the relevant reference speeds for takeoff, climb, etc... When checked, the values will by dynamically generated by the simulation, and when unchecked the values in the various CFG files will be used. Note that this has no effect on the flight model.
Stall Protection

Stall protection is a system which prevents the AoA from getting too high. This is done by software monitoring the plane's angle of attack sensor, and when a high alpha situation is detected, the software lowers the nose of the plane to maintain a high - but still safe - AoA. This system is designed to prevent pilots from stalling the aircraft and to allow them to get the best possible performance in emergency e.g. in a wind-shear.
NOTE: This section will be used when the Fly By Wire parameter is checked for active stall protection. However if Fly By Wire is not checked, the values here will still be used to generate the simulation stall warnings.
The following parameters can be used to control this system:
- Stall Protection: When checked, Stall Protection is enabled.
- Off Limit: The alpha below which the Stall Protection can be disabled, in degrees (if also below the Off Yoke Limit).
- Off Yoke Limit: The yoke position percentage below which the Stall Protection can be disabled (if also below the Off Limit).
- On Limit: The alpha - in degrees - above which the Stall Protection timer starts.
- On Goal: The alpha - in degrees - that the Stall Protection will attempt to reach when triggered.
- Timer Trigger: The duration, in seconds, that the alpha must be above On Limit before the Alpha Protection is triggered.
Flaps

This section is for tuning the different flaps for the aircraft. You can have multiple flaps defined, adding them using the + button and removing them using the x button. For example, if you have two flaps you would have two sections: flaps.0 and flaps.1.
The available parameters are:
- Type: This defines the flaps type, which can be any one of the following:
- None
- Trailing edge
- Leading edge
- System Type: This defines the type of electrical system that drives the flaps to deflect. This can be any one of the following:
- Electrical
- Hydraulic
- Pneumatic
- Manual
- None
- System Type Index: If you are using electrical flaps, this parameter specifies the index of the flaps motor Circuit. Default is 0.
- Span Outboard: Outboard span area, as a Percent Over 100. This is how far out from the wing-root that the flaps stretch (the total span is considered as the distance between wing root and wing tip). On most planes this will be 1.0 - aileron_span_outboard. This value needs to be matching the lift and drag added by flaps. Small flap systems should add small amounts of lift.Default value is 0.75, and note that any input value given is clamped between 0.4 and 1.0.IMPORTANT! Despite the flaps span being defined in each flap section, the span is common to all the simulation will take the maximum span value defined in flap sections and clamp it between 0.4 and 1.0
- Extending Time: The time it takes for the flap set to extend to the fullest deflection angle specified (in seconds).
- Flaps Sequence Increasing: This value is an index to another flaps, and specifies that these flaps should only start moving towards the down position when the flaps with the corresponding index have finished moving. Setting this to -1 means that no such restriction should be applied.
- Flaps Sequence Decreasing: This value is an index to another flaps, specifies that these flaps should only start moving towards the up position when the flaps with the corresponding index have finished moving. Setting this to -1 means that no such restriction should be applied.
- Damaging Speed: This sets the speed - in Knots - above which the flaps begin to get damaged if extended. If this is set to 0 it means that no damage should be applied, regardless of the speed. For more information please see here: Flaps Damage and Blowout.
- Blowout Speed: This sets the speed - in Knots - above which the flaps are blown out. If this is set to 0 it means that no blowouts will occur, regardless of the speed. For more information please see here: Flaps Damage and Blowout.
- Maneuvering Flaps: When checked, this tells the simulation that maneuvering flaps are available.
- Delay Between Flap Index: This sets the delay - in seconds - between changing from one flaps index to another.
- Lift Scalar: This scalar allows you to scale the lift contribution of a specific flap system. This is necessary to compensate for the scale by the deflection angle in radians, in order to reach 100%. The flap lift formula is the following:
total_flap_lift = lift_coef_flaps * (system1.lift_scalar * system1.deflectionangleradians + system2.lift_scalar * system 2.deflectionangleradians...)
- Drag Scalar: Scalar that allows you to scale the drag contribution of a specific flap system. It is necessary to compensate for the scale by the deflection angle in radians, in order to reach 100%. The flap drag formula is the following:
total_flap_drag = drag_coef_flaps * (system1.drag_scalar * system1.deflectionangleradians + system2.drag_scalar * system 2.deflectionangleradians...)
- Pitch Scalar: The percentage of total pitch due to flap deflection that this flap set is responsible for at full deflection.This is a legacy FSX parameter not used in the modern flight model. In the modern flight model, the pitch generated by flaps will depend on the lift added and the longitudinal position of the wings. The parameters of each flap level allow to move the wing longitudinally for each flap level to adjust the amount of pitch. Default value is 1.
- Max On Ground Position: The maximal flap extension stage available when an aircraft is on the ground. This must be a value between 0 and the maximal stage described (see flaps-position.N).
- Altitude Limit: Specifies an altitude (in ft) above which the flaps cannot be extended. Setting this to -1 will disable the feature.
Flaps-Position
 This is a flap stage description, and you can have multiple definitions (starting at flaps-position.0) for each indexed Flaps. Each position is defined using the following parameters:
This is a flap stage description, and you can have multiple definitions (starting at flaps-position.0) for each indexed Flaps. Each position is defined using the following parameters:
- Pos - sets the flaps angular position for the stage, in degrees.
- Max Speed - sets the airspeed limit for the stage, in knots.
- Drag Coef - sets a scalar to add or remove drag for the stage.
- Lift Coef - sets a scalar to add or remove lift for the stage.
- Area Coef - sets a scalar to add or remove area to the flap for the stage.
- Added Camber - sets an increase in the flap camber, raising the maximum lift coefficient or the upper limit to the lift a wing can generate. Values here are in radians.
- Aft CoL Displacement - sets the center of lift for the flaps stage, where a positive value will move the center of lift forward (generating more pitch up) and a negative value will move it back (generating more pitch down).
- Added Incidence - a scalar that lets you define how much of the additional lift is applied at 0° AoA. So, when set to 1 (100%), the additional lift is added constantly on the whole AoA range. When set to 0.5 (the default value), only 50% of the additional lift will be added at 0° of AoA and 100% at the stall AoA. The values in between depend on the normalization process. 0.5 (50%) is the minimal value and you can go beyond 1.0, if required.
To add positions to the flaps stage, you can use the + button at the bottom, and to remove positions you can select the position then click on the x button.
Flaps-position-inhibit-or
 Here you can create a set of conditions which - if any of them are valid - will inhibit the flaps settings from affecting the flaps at the indexed position. There can be multiple entries for this parameter, one for each flaps position, starting at 0 and up to the number of positions - 1. You can add position indices to target using the
Here you can create a set of conditions which - if any of them are valid - will inhibit the flaps settings from affecting the flaps at the indexed position. There can be multiple entries for this parameter, one for each flaps position, starting at 0 and up to the number of positions - 1. You can add position indices to target using the + button at the bottom left, and remove position indices by selecting them and clicking the x button.
After adding a position index to set up a condition for, you can then add in one or more conditions by clicking the + button on the right. This will create a new indexed condition which can be one of the following:
- "air" - plane is in the air
- "ground" - plane is on the ground
- "increasing" - inhibit only if rising flaps level
- "decreasing" - inhibit only if decreasing flaps level
Flaps-position-inhibit-and

Here you can create a set of conditions which - if all of them are valid - will inhibit the flaps settings from affecting the flaps at the indexed position. There can be multiple entries for this parameter, one for each flaps position, starting at 0 and up to the number of positions - 1. You can add position indices to target using the + button at the bottom left, and remove position indices by selecting them and clicking the x button.
After adding a position index to set up a condition for, you can then add in one or more conditions by clicking the + button on the right. This will create a new indexed condition which can be one of the following:
- "air" - plane is in the air
- "ground" - plane is on the ground
- "increasing" - inhibit only if rising flaps level
- "decreasing" - inhibit only if decreasing flaps level
Flaps-position-autoretract
 This parameter sets the auto-retract rules for flaps. There can be multiple entries for this parameter, one for each indexed flaps position. You can add position indices to target using the
This parameter sets the auto-retract rules for flaps. There can be multiple entries for this parameter, one for each indexed flaps position. You can add position indices to target using the + button at the bottom left, and remove position indices by selecting them and clicking the x button. Each index has the following parameters:
- Flaps Angle - the flaps angle in degrees
- Speed Retract Limit - the airspeed in Knots at which the auto-retract triggers
- New Airspeed Limit - the new airspeed limit, in Knots
Flaps-position-maneuvering
 This parameter is used to enabled or disable dynamic maneuvering for an indexed flaps position rather than have them use a single static degree value. You can add position indices to target using the
This parameter is used to enabled or disable dynamic maneuvering for an indexed flaps position rather than have them use a single static degree value. You can add position indices to target using the + button at the bottom left, and remove position indices by selecting them and clicking the x button.
Flaps-position-speed-factor
 This parameter sets the correspondence between the speed of the aircraft and a factor on the max angle of the indexed flaps position. There can be multiple entries for this parameter, one for each indexed flaps position, and you can add position indices to target using the
This parameter sets the correspondence between the speed of the aircraft and a factor on the max angle of the indexed flaps position. There can be multiple entries for this parameter, one for each indexed flaps position, and you can add position indices to target using the + button at the bottom left, and remove position indices by selecting them and clicking the x button. Each indexed position has the following two parameters:
- Plane Speed - The aircraft speed (in Knots).
- Angle-Factor - The angle factor, between 0 and 1.
Flaps-position-speed-override-above
 This parameter sets the override rules for flaps at the given position when above a certain speed. There can be multiple entries for this parameter, one for each indexed flaps position, and you can add position indices to target using the
This parameter sets the override rules for flaps at the given position when above a certain speed. There can be multiple entries for this parameter, one for each indexed flaps position, and you can add position indices to target using the + button at the bottom left, and remove position indices by selecting them and clicking the x button. Each indexed position has the following two parameters:
- Flaps-Position-Override - the flaps position to use as the override
- Speed Above Override - the speed (in Knots) above which the given flaps position is used instead of the current one.
Flaps-position-speed-override-below

This parameter sets the override rules for flaps at the given position when below a certain speed. There can be multiple entries for this parameter, one for each indexed flaps position, and you can add position indices to target using the + button at the bottom left, and remove position indices by selecting them and clicking the x button. Each indexed position has the following two parameters:
- Flaps-Position-Override - the flaps position to use as the override
- Speed Below Override - the speed (in Knots) below which the given flaps position is used instead of the current one.
Interactive Points

Interactive Points in Microsoft Flight Simulator are used to define the position of various doors of the aircraft - regular, emergency, and cargo doors - as well as some other points to interact with Airport Services, such as the end of a fuel hose to interact with a FuelTruck, or the end of an electrical cable to interact with a GroundPowerUnit vehicle.
When setting up interactive points you should first define how many of them the aircraft will have using the following parameter:
Number Of Interactive Points: The number of interactive points being defined. If greater than 0, each one needs to have a corresponding interactive_point.N parameter, which are added by clicking on the + at the bottom of the page (and you can also select any defined interactive point and remove it by clicking the x button). Each interactive point is defined using the following parameters:
NOTE: Before continuing, we recommend that you read over the following additional information related to interactive points - Type, Position, and Orientation
- Open Close Rate: Percent per second of animation of the interactive point (used mostly for doors).
- Pos (Z, X, Y): Coordinate in ft of the point relative to aircraft Datum Reference Point, on the back-to-front (Z), left-to-right (X), and bottom-to-top (Y) axis. Note that you have the option to Show Gizmo, in which case you will be able to then visually position the interactive point within the simulation. These values can be retrieved using the SimVars
INTERACTIVE_POINT_POSZ,INTERACTIVE_POINT_POSX, andINTERACTIVE_POINT_POSZ.
- Type: This option is used to determine the type of the point, which can be any one of the following:
- Main exit
- Cargo exit/door
- Emergency exit
- Fuel hose
- Ground Power cable
- Air Start Unit
- Tailhook
- Unknown
INTERACTIVE_POINT_TYPE.
- Rotation - Pitch: Pitch, in degrees, of the point orientation, where 0° means horizontal. In the simulation, this value can be retrieved using the SimVar
INTERACTIVE_POINT_PITCH.
- Rotation - Bank: Bank, in degrees, of the point orientation (currently unused, please set 0 here). In the simulation, this value can be retrieved using the SimVar
INTERACTIVE_POINT_BANK.
- Rotation - Heading: Heading, in degrees, of the point orientation (0° means same heading as the aircraft). In the simulation, this value can be retrieved using the SimVar
INTERACTIVE_POINT_HEADING.
The following parameters are related to how Jetways will interact with the point being defined. Please see the section on Jetway Values for additional information before going ahead and defining these parameters.
- Jetway Left Bend: A percentage value for the jetway left bend. In the simulation, this value can be retrieved using the SimVar
INTERACTIVE_POINT_JETWAY_LEFT_BEND.
- Jetway Left Deployment: A value, in degrees, for the jetway left deployment. In the simulation, this value can be retrieved using the SimVar
INTERACTIVE_POINT_JETWAY_LEFT_DEPLOYMENT.
- Jetway Right Bend: A percentage value for the jetway right bend. In the simulation, this value can be retrieved using the SimVar
INTERACTIVE_POINT_JETWAY_RIGHT_BEND.
- Jetway Right Deployment: A value, in degrees, for the jetway right deployment. In the simulation, this value can be retrieved using the SimVar
INTERACTIVE_POINT_JETWAY_RIGHT_DEPLOYMENT.
- Jetway Top Horizontal: A value, between -100 and 100, for the jetway horizontal line. In the simulation, this value can be retrieved using the SimVar
INTERACTIVE_POINT_JETWAY_TOP_HORIZONTAL.
- Jetway Top Vertical: A value, between -100 and 100, for the jetway vertical line. In the simulation, this value can be retrieved using the SimVar
INTERACTIVE_POINT_JETWAY_TOP_VERTICAL.
- Exit Open Failure Speed - A value which corresponds to the speed at which the aircraft will have a failure if an exit is open, in ft per second. This is only valid if the interactive point is of the type 0 (Exit). If set to -1, failures of this type will be disabled.
Fuel

This section is only visible when the Use Legacy Fuel checkbox is checked. When you do this, you disable the modern Fuel System and tell your aircraft to use the legacy fuel system. Note that while we call this the legacy system, it is not deprecated and can be used in modern aircraft, in particular when the aircraft is small and doesn't require any of the complexity that the modern fuel system permits. The legacy /simplified fuel system has the following parameters:
- Tank: From this section you define the properties of the tanks that are available to the aircraft. All possible tanks are listed here, and you simply need to select the one you want to use in the aircraft and then edit the following parameters to enable it -
- Position (long, lat, vert): The position of the fuel tank relative to the Reference Datum Position. This parameter requires you to set the Longitude (Z), Latitude (X) and Vertical (Y) position - in ft - and you can enable the Show Gizmo option to visually position it.
- Total Fuel Capacity: Set the total fuel capacity for the tank, in Gallons. Note that setting this value to 0 means that the tank is not used for the aircraft being defined.
- Useable Fuel Capacity: Set how much of the total fuel capacity can actually be used, in Gallons.
- Fuel Type: The fuel type for the engines. This parameter has the following options -
- OCTANE 100
- JET A
- OCTANE 80
- AUTO GAS
- JET B
- Num Tanks: This slider permits you to set how many tank selectors are available.
- Electric Pump: When checked, it means that the aircraft has an electric driven fuel pump.
- Engine Driven Pump: When checked, it means that the aircraft has an engine driven fuel pump.
- Manual Transfer Pump: When checked, it means that the aircraft has a manual transfer fuel pump.
- Manual Pressure Pump: When checked, it means that the aircraft has a manual pressure fuel pump.
- Anemometer Pump: When checked, it means that the aircraft has an anemometer pump.
- Fuel Dump Rate: The fuel dump rate, expressed as a Percent Over 100.
- Max pressure Auto Pump: The maximum pressure for the auto pump, in psi.
- Fuel Transfer Pump: From this section you can set up the various fuel transfer pumps that form a part of the legacy / simplified fuel system. To add a pump you click on the
+button at the bottom and then edit the available parameters. If you need to remove a pump, simply select it and then click thexbutton. The required parameters per-pump are as follows:- Source: Here you can select the source tank to transfer from. It can be any one of the following:
Off
All
Left
Right
Left auxiliary
Right auxiliary
Center
Center2
Center3
External1
External2
Right tip
Left tip
Crossfeed
Crossfeed left to right
Crossfeed right to left
Both
External
Isolate
Left main
Right main - Destination: Here you can select the source tank to transfer to. The tanks available are the same as those available for the source tank.
- Rate: The rate of transfer through this pump, expressed in lbs per second.
- Pump ID: The Pump ID is an integer value used to identify the pump and link it to an Electrical circuit.
To toggle the pump on or off you need to have first created a circuit of the type
CIRCUIT_FUEL_TRANSFER_PUMPusing thecircuit.Nparameter of the systems.cfg file, and the circuit Type index needs to be the same as the Pump ID. The pump can then be toggled on/off using theFUEL_TRANSFER_CUSTOM_INDEX_TOGGLEkey event, or using theELECTRICAL_CIRCUIT_TOGGLEkey event. - Source: Here you can select the source tank to transfer from. It can be any one of the following:
- Default Fuel Tank Selector Exclusive: This section is for setting the behaviour of the fuel tanks selector. The first option is to choose the default fuel selector which is to be used in case of autostart, for all engines. It has the same options as those available to transfer pump. The second behaviour to select the engines individually and assign a selector to each of them (up to a maximum of 4).
- Fuel Tank Priority: This last parameter is used to set the priority in which the various tanks of the aircraft should be used. You can use the
+button to add a priority value for each available tank, and can remove a priority using thexbutton. Note that you can have more than one tank sharing the same priority.